这本书主要关于查理.芒格的汇编,收集了他的学习方法、决策过程、投资策略,以及他的演讲和名言。
这本书主要关于查理.芒格的汇编,收集了他的学习方法、决策过程、投资策略,以及他的演讲和名言。
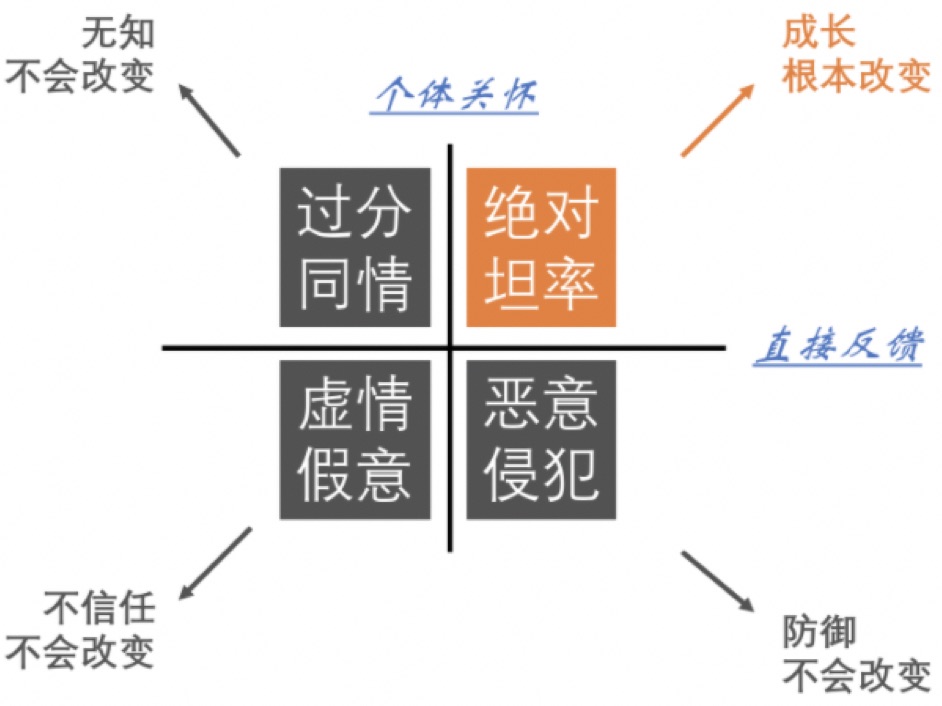
这个课程主要指出绩效评价和绩效沟通中需要注意的关键点,绩效是日常管理的检验,不只是对员工产出的考核,也是对管理者领导力的考核。其中比较有感触的点:

这个课程主要是为了提醒管理者,作为生产经营的参与方,应具备经营者意识、全局最优资源分配意识,应破除领地意识,树立阵地意识,使公司资产得到更高效的配置,从而产生更大的价值。
最近这两年感觉自己总是忙的晕头转向,工作、生活、健康、学习难以平衡,最后感觉哪方面都没做好,直到我看了一本书《精要主义》,读后根据书中的方法进行实践,发现生活确实美好了很多,虽然因此失去了一些东西,但也因此得到了一些更宝贵的东西。
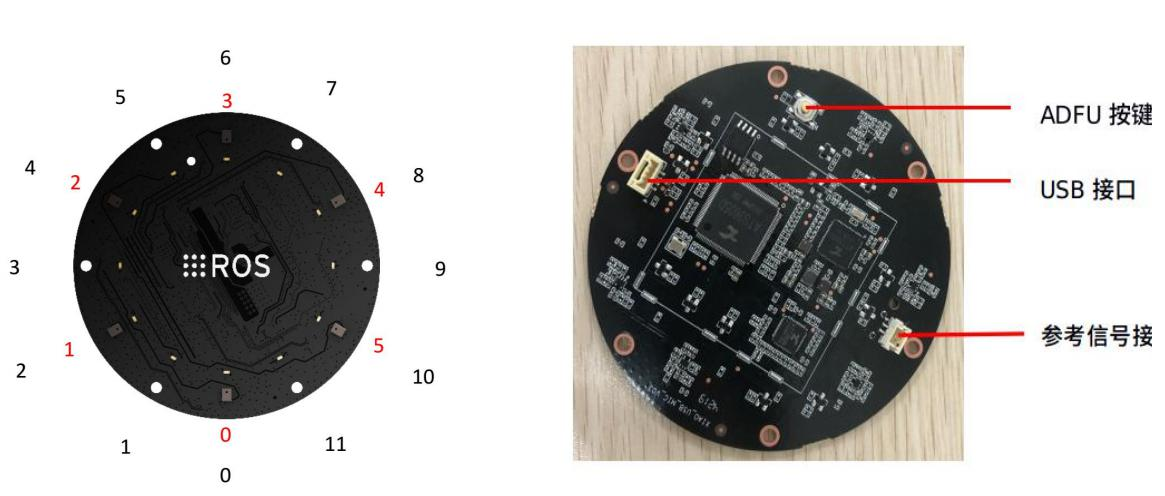
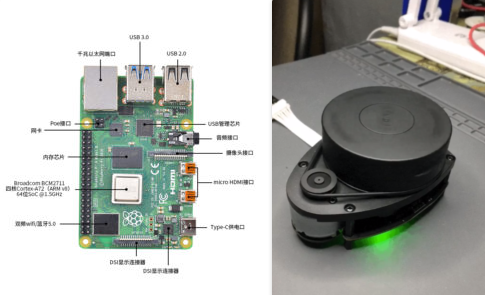
上一次带大家实践视觉建图与导航后,有朋友留言想给机器人增加语音控制功能,本文就带大家一起实现。为了使效果更佳,例如当叫机器人“过来”、“到我这来”等时,需要机器人能找到说话所在的方向,所以我们将采用麦克风阵列。

上一次,我们实现了激光雷达+自研底盘的SLAM建图和导航。这次将带大家学习如何使用深度相机实现机器人的视觉SLAM建图及导航。

我们在做机器人调试时,只能通过串口发命令来控制,有时跟着出门了还得带着电脑,实在很不方便,今天来教大家如何使用PS2手柄来直接控制Arduino设备。

我们完成SLAM建图后,如何在导航时让自己的底盘正常工作,是很多新手面临的问题。上位机大家通常采用pi或nvidia jetson nano甚至更强算力的板子,系统一般采用ubuntu,这使得上位机的库几乎是通用的;而底盘不同,单片机有stm32、arduino、51等,电机的种类就更多了,电机的精准度和质量参差不齐,容易在底盘动起来后难以实现精准控制。如何利用电机编码器进行精准的底盘移动并上报odom,不少人会在这里花费大量时间,本文将针对此类问题进行具体讲解。
yan 21.11.25

最近换了台服务器,在发布pydp时依赖的人脸识别库dlib总是安装失败,查了下pip安装dlib似乎都会遇到这个问题,这里记录下解决方法。
近期交付项目较多,团队同学出差客户现场或远程与客户直接接触的越来越多,出现一些问题,这里统一梳理明确下与客户相关的注意事项。
之前学习ros,nvidia jetson nano板子装的ubuntu18.04系统比较正常,但是pi4b的板子装的raspberry系统会出现各种依赖问题。最近想充分利用下几块Pi4B的板子,反复试了pi4安装官方/非官方的ubuntu18.04.5+ROS Melodic版本,最终都会卡在map-server或rviz等依赖上。最终用Pi4B + Ubuntu20.04.3 + ROS Noetic + RpLidar安装测试成功,记录一下安装过程。
开发板平时不连接显示器,放时间久了会自动挂起连不上,解决方法如下:
在测试ros的slam建图,建好地图使用时,出现一个很诡异的现象:在rviz上里点击”2D Nav Goal”按钮指定目的地时机器人没反应,也没有任何错误日志,像是就没发出去似的。
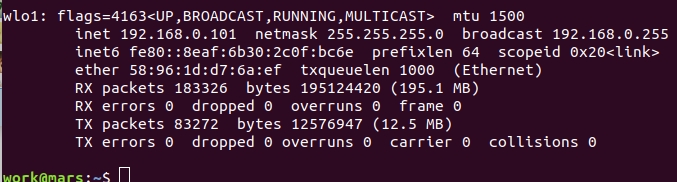
ROS 机器人的实验和开发中,通常需要一台移动机器人和一台 PC 配合使用,不少初学者都会有个困惑,即PC和机器人上的ROS命令都只针对本机,而机器人上的ubuntu通常都不是桌面版,那么PC上那些可视化的工具怎么应用在机器人上呢?即怎么才能利用PC上的ROS指令和工具直接访问和展示机器人上的数据呢?其实非常简单,通过ROS_MASTER_URI就可以方便的实现,本文我们就来简单介绍一下吧。
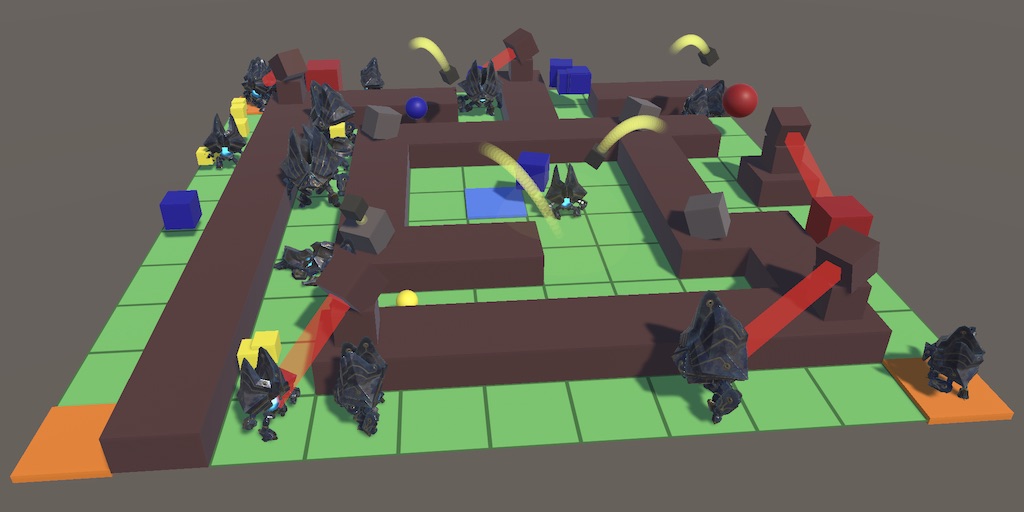
上一节,我们学习了如何在地图中建造防御塔、锁定射程内的敌人,并发射激光束攻击敌人。由于被吐槽敌人都是方块不好看,本节将先重点学习如何导入敌人模型,让画面好看些。
上一节,我们学习了如何在地图中添加出生点、敌人,并让敌人沿着规划路径前往离他最近的目的地。本节将重点学习如何尝试建造防御塔、锁定并攻击敌人。
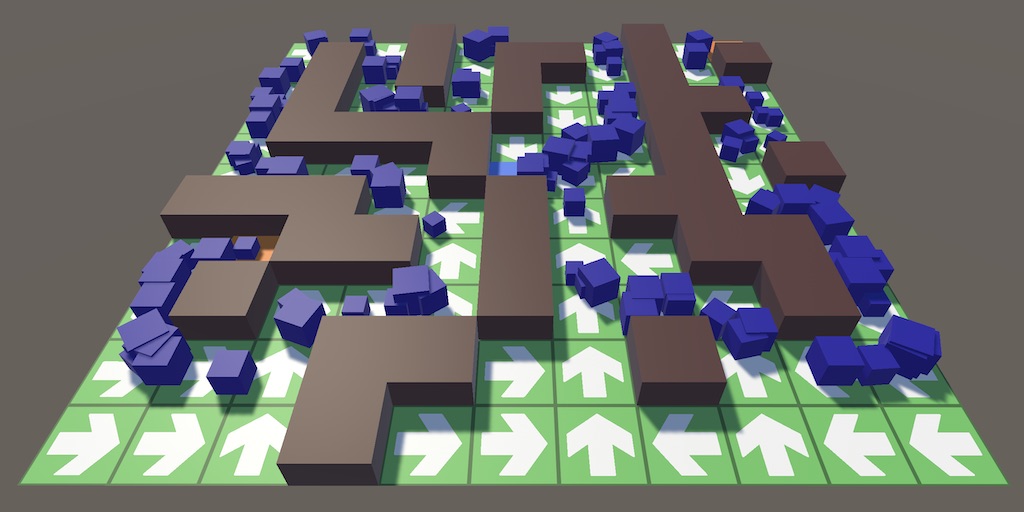
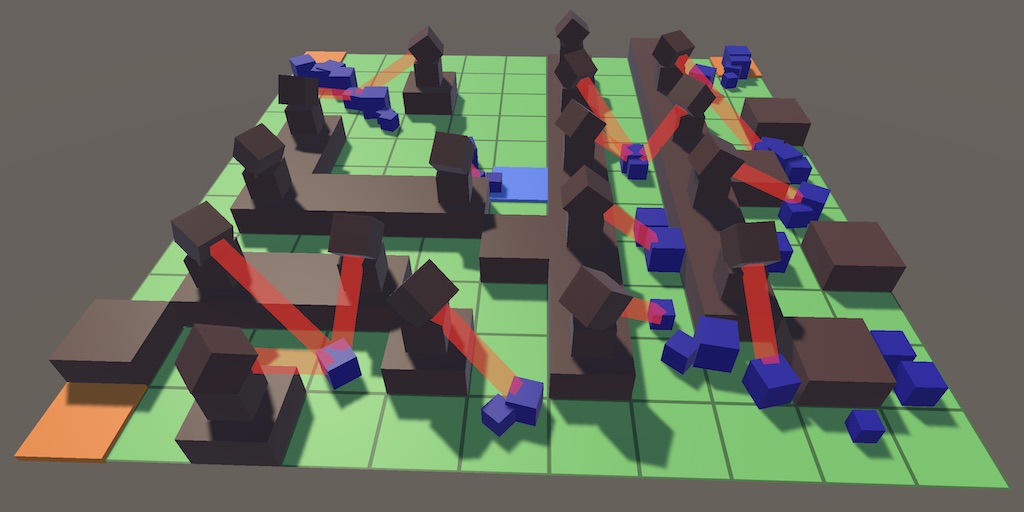
上一节,我们讲解了如何创建游戏地图、目的地和墙的放置、寻路。本节将重点学习如何在地图中添加出生点、敌人,并让敌人沿着规划路径前往离他最近的目的地。

上一次,我们学习了U3D的入门,并尝试了简单的弹跳、发射、碰撞效果制作技巧。这次,我们试图挑战下,尝试做一个粗糙版的塔防游戏:通过在敌人必经之路上建造防御塔,以在敌人到达目的地之前消灭它们。我们将通过这个简单游戏的制作来练习地图布置、敌人寻路、锁定敌人并攻击、弹道轨迹、爆炸效果、游戏场景管理、过场动画、3D模型导入、热加载等技术点。

最近项目中要使用3D渲染,门外汉一抹黑,经过一段时间的尝试,发现Unity的开发效率和效果精细程度还不错。从今天开始,一边学习一边整理下学习历程。