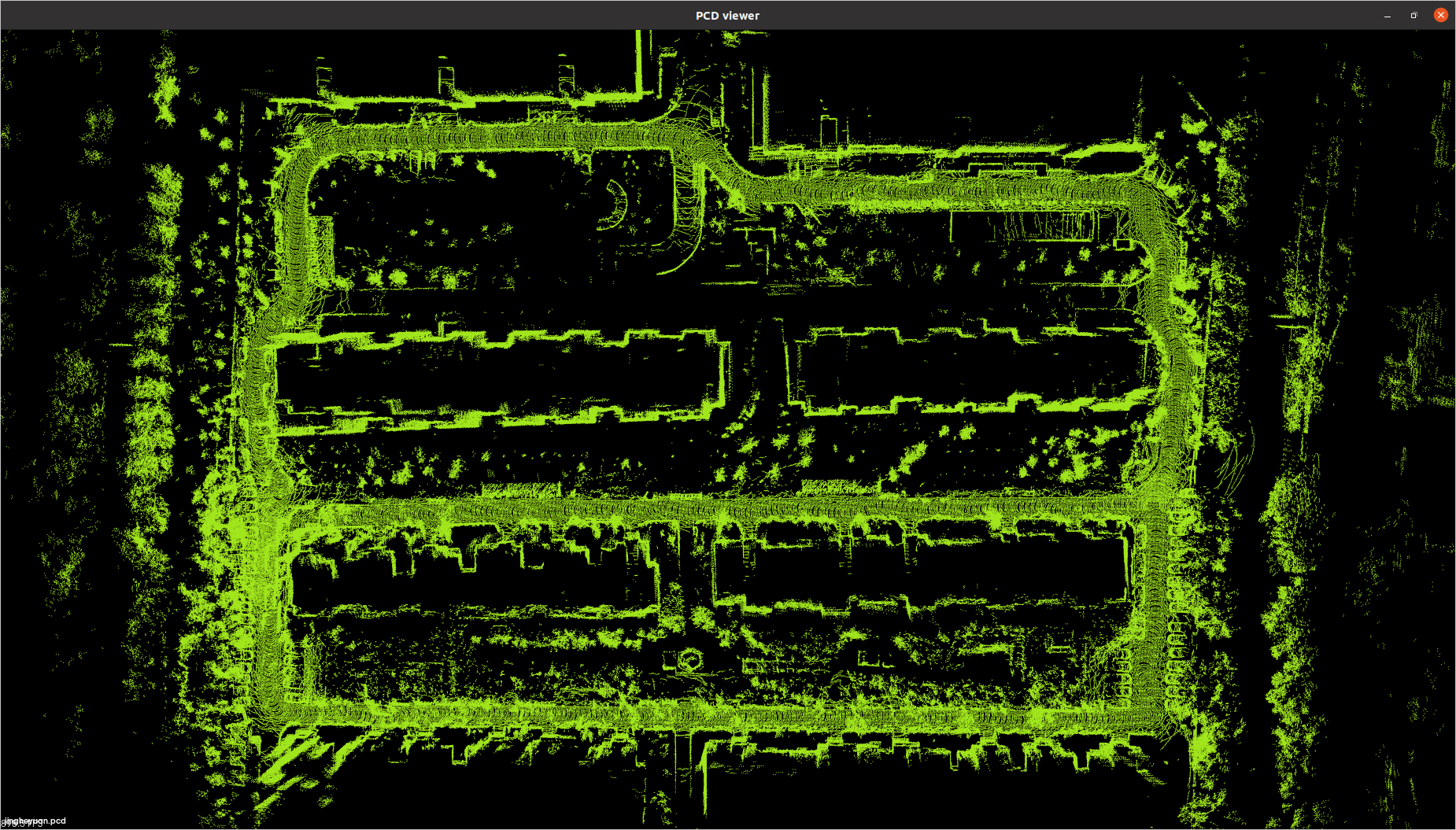
LIO-SAM对输入的点云/imu数据太敏感,道路距离过窄过宽都容易建图失败,在没有建筑物的公园基本用不了。因此本文尝试使用对特征点要求相对较少的ndt算法,来看看在小区或公园等场景的建图效果。
LIO-SAM对输入的点云/imu数据太敏感,道路距离过窄过宽都容易建图失败,在没有建筑物的公园基本用不了。因此本文尝试使用对特征点要求相对较少的ndt算法,来看看在小区或公园等场景的建图效果。

今天开始尝试使用Lidar+IMU进行3D SLAM建图,本文记录下实验过程。
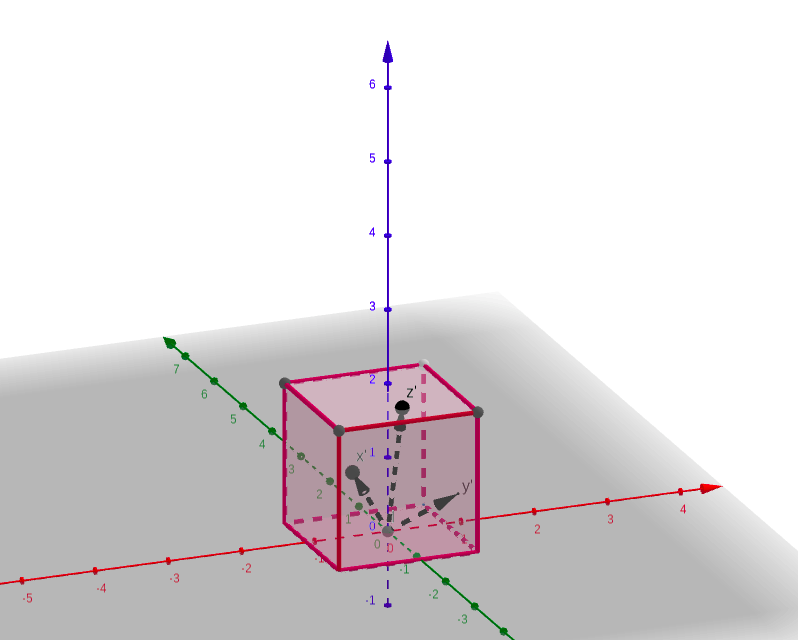
在使用LIO-SAM进行Lidar+IMU建图之前,需要做两个标定工作,IMU内参标定和Lidar-IMU外参标定。IMU内参标定,可以解决其固有的测量误差问题;Lidar和IMU的外参标定(以下简称“外参标定”)。外参标定的目的是获得激光雷达和IMU之间的位置转换关系,其中包括平移关系和旋转关系,分别对应最终输出结果中的平移向量与旋转矩阵。

我们在使用SLAM建图后,为了提高显示及运行效果,通常需要对地图进行一些调整,比如点云毛刺清理、增加未知区域的边界防护等。本文主要讲解下如何对2D .gpm地图文件进行编辑修改的方法。
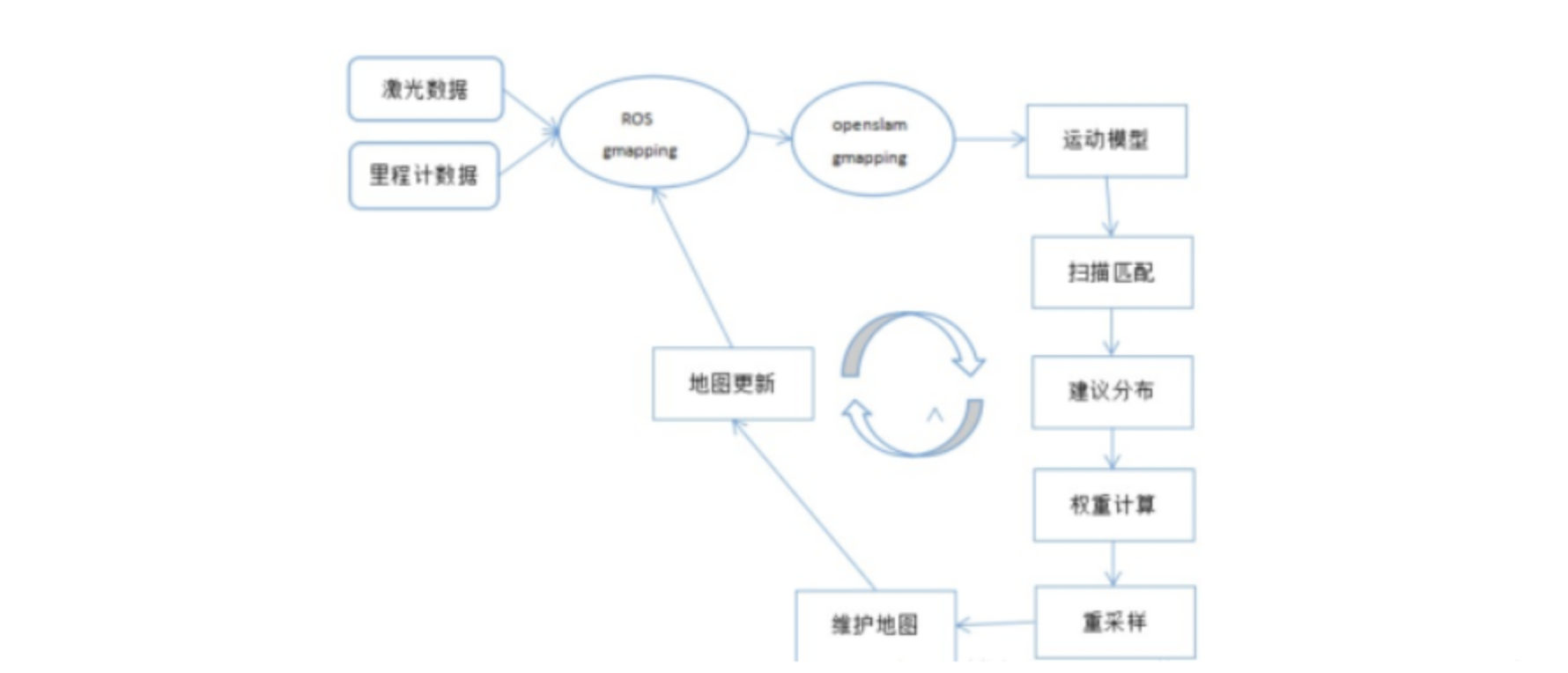
本文主要针对常见的2D建图算法Gmapping、Hector、Karto、Cartographer进行对比,以确定在室内小场景、室外大场景下使用哪种建图算法更为合适。

主流的激光SLAM算法有hector、gmapping、karto、cartographer。很多同学使用ROS默认自带的gmapping、hector等比较多,这次带大家一起尝试下传说中的google cartographer,看看效果差别有多大。
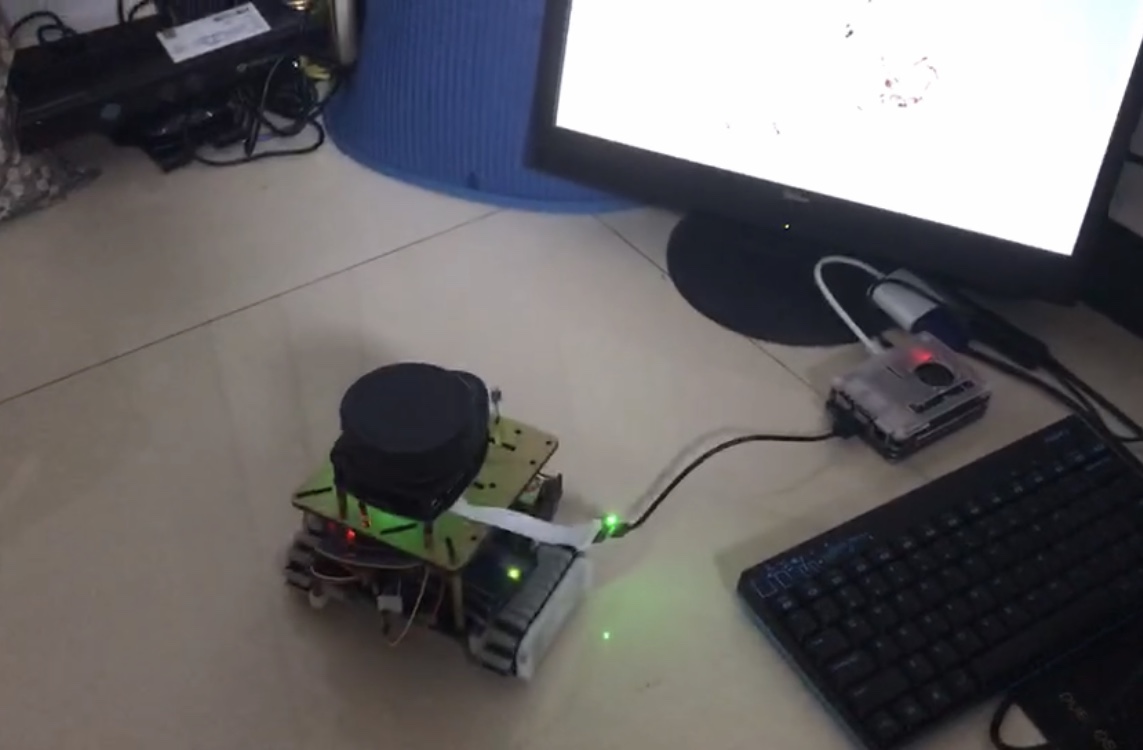
移动机器人在环境中获取障碍物的具体位置、房间的内部轮廓等信息都是非常必要的,这些信息是机器人创建地图、进行导航的基础数据。考虑成本,买了一个SLAMTEC公司的低成本二维激光雷达RpLidar A1进行初步的学习,它可以最快10hz的频率检测360度范围内的障碍物信息,最远检测距离12米,适合室内移动机器人使用。本文讲解如何使用它感知周围环境。

全国SLAM技术论坛由中国图象图形学学会CSIG主办,每年举办一届,邀请学术界和企业届的专家围绕SLAM技术的研究、发展以及产业化应用作技术分享。本文整理自浙江大学刘勇教授在第二届全国SLAM技术论坛中的报告。

随着自动驾驶技术的发展,在未知环境中智能汽车的定位技术成为该领域研究的核心。目前定位技术主要的解决方案是基于全球定位系统(GPS),但是在某些特殊的环境中如下车库,没有 GPS 信号如何解决定位问题就是本文研究的关键所在。