问题现象:
在Ubuntu 22.04上调试RS16的3D建图,发现ROS2无法正常显示点云,尝试使用官方的RSView工具也无法正常显示点云。
- Ubuntu 22.04
- VTK:9.1.0
- PCL:1.12.1
排查过程:
1. 确认传感器正常
切换到Ubuntu 20.04系统,官方RSView可以正常显示点云。
- Ubuntu 20.04
- VTK:7.1.1
- PCL:1.10.0
2. 确认PCL+VTK可正常渲染点云
测试生成点云代码:
vim pcl_test.cpp
#include <iostream>
#include <pcl/common/common_headers.h>
#include <pcl/io/pcd_io.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/visualization/cloud_viewer.h>
#include <pcl/console/parse.h>
int main(int argc, char **argv)
{
std::cout << "Test PCL !!!" << std::endl;
pcl::PointCloud<pcl::PointXYZRGB>::Ptr point_cloud_ptr (new pcl::PointCloud<pcl::PointXYZRGB>);
uint8_t r(255), g(15), b(15);
for (float z(-1.0); z <= 1.0; z += 0.05)
{
for (float angle(0.0); angle <= 360.0; angle += 5.0)
{
pcl::PointXYZRGB point;
point.x = 0.5 * cosf (pcl::deg2rad(angle));
point.y = sinf (pcl::deg2rad(angle));
point.z = z;
uint32_t rgb = (static_cast<uint32_t>(r) << 16 |
static_cast<uint32_t>(g) << 8 | static_cast<uint32_t>(b));
point.rgb = *reinterpret_cast<float*>(&rgb);
point_cloud_ptr->points.push_back (point);
}
if (z < 0.0)
{
r -= 12;
g += 12;
}
else
{
g -= 12;
b += 12;
}
}
point_cloud_ptr->width = (int) point_cloud_ptr->points.size ();
point_cloud_ptr->height = 1;
pcl::visualization::PCLVisualizer::Ptr RGBViewer(new pcl::visualization::PCLVisualizer("3D Viewer"));
pcl::visualization::PointCloudColorHandlerRGBField<pcl::PointXYZRGB> rgb(point_cloud_ptr);
RGBViewer->setBackgroundColor(0,0,0);
RGBViewer->addPointCloud<pcl::PointXYZRGB> (point_cloud_ptr,rgb,"rgb cloud");
RGBViewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE,1,"rgb cloud");
RGBViewer->addCoordinateSystem(1.0);
RGBViewer->initCameraParameters();
while (!RGBViewer->wasStopped())
{
RGBViewer->spin();
}
return 0;
}编译配置:
vim CMakeLists.txt
cmake_minimum_required(VERSION 2.6)
project(pcl_test)
find_package(PCL REQUIRED)
include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})
add_executable(pcl_test pcl_test.cpp)
target_link_libraries (pcl_test ${PCL_LIBRARIES})
install(TARGETS pcl_test RUNTIME DESTINATION bin)编译运行测试:
cd build
cmake ..
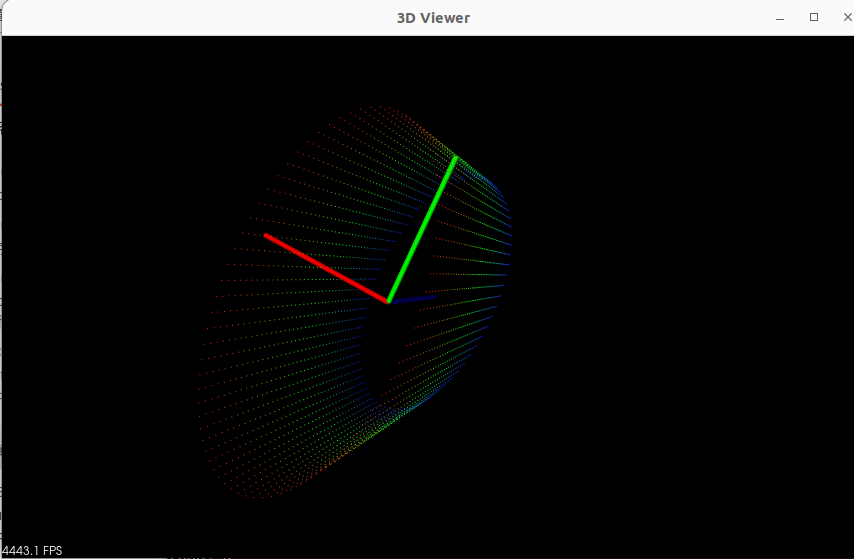
make
./pcl_test可以正常显示点云:
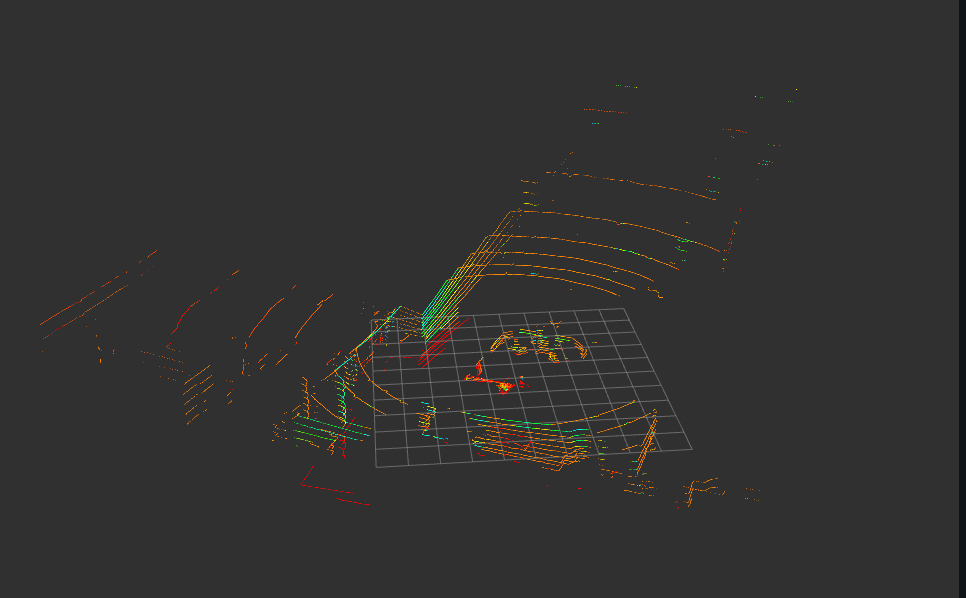
3. 使用rs_driver无法查看点云
打开工具编译,用rs_driver_viewer查看点云,发现无法正常显示,怀疑为rs官方驱动库里的点云包解析过程出现问题(可能与PCL/VTK的版本升级接口变化有关):
cd ~/ros2_ws/src/rslidar_sdk/src/rs_driver
mkdir build && cd build
# build
cmake -DCOMPILE_TOOLS=ON ..
make
# run
./tool/rs_driver_viewer -type=RS16如果编译报pcl/io/io.h找不到pcl/common/io.h,可以按如下方式修改:
vim ~/ros2_ws/src/rs_driver/msg/pcl_point_cloud_msg.hpp
// #include <pcl/io/io.h> 改为pcd_io.h
#include <pcl/io/pcd_io.h>
如果编译后运行出core,core栈在spinOnce,是由于VTK9.1.0的一个bug导致,可以暂时改为spin规避:
cd ~/ros2_ws/src/rslidar_sdk/src/rs_driver/build
# debug
gdb ./tool/rs_driver_viewer
(gdb) set args -type RS16
(gdb) r
(gdb) bt
#0 0x00007ffff38d8c10 in _XEventsQueued () from /lib/x86_64-linux-gnu/libX11.so.6
#1 0x00007ffff38c5291 in XPending () from /lib/x86_64-linux-gnu/libX11.so.6
#2 0x00007ffff5ac6b8f in vtkXRenderWindowInteractor::StartEventLoop() () from
/lib/x86_64-linux-gnu/libvtkRenderingUI-9.1.so.1
#3 0x00007ffff7ec1f8c in pcl::visualization::PCLVisualizer::spinOnce(int, bool) () from /lib/x86_64-linux-gnu/libpcl_visualization.so.1.12
#4 0x000055555555f333 in main ()
# fix
vim tool/rs_driver_viewer.cpp
// pcl_viewer->spinOnce(); 临时改为spin
pcl_viewer->spin();
# run
./tool/rs_driver_viewer -type=RS164. 确认Ubuntu 22.04里数据包正常
切换到Ubuntu 22.04系统,配置网络后,tcpdump/wireshark抓包,6699/7788端口UDP消息包收发正常。但官方RSView依然无法显示点云,也获取不到Lidar信息。
仔细看数据包,与Ubuntu20.04相比,都是每隔几秒,会有ICMP的报警,但报警内容有细微差异:
Ubuntu20.04的报警:IP xxx.pc.ip > xxx.lidar.ip : ICMP host xxx.pc.ip unreachable, length 556(有报警不影响电点显示)
Ubuntu22.04的报警: IP xxx.pc.ip > xxx.lidar.ip : ICMP host xxx.pc.ip unreachable – admin prohibited filter, length 556(看起来pc ping lidar的操作像是被系统拦截过滤了似的)

5. 确认防火墙影响
尝试关闭防火墙,在Ubuntu22.04上一共找到三类防火墙,全部关掉:
# disable ufw(不起作用)
sudo ufw disable
# stop iptables(不起作用)
sudo service iptables stop
# disable firewalld(关闭后,admin prohibited filter报警消失)
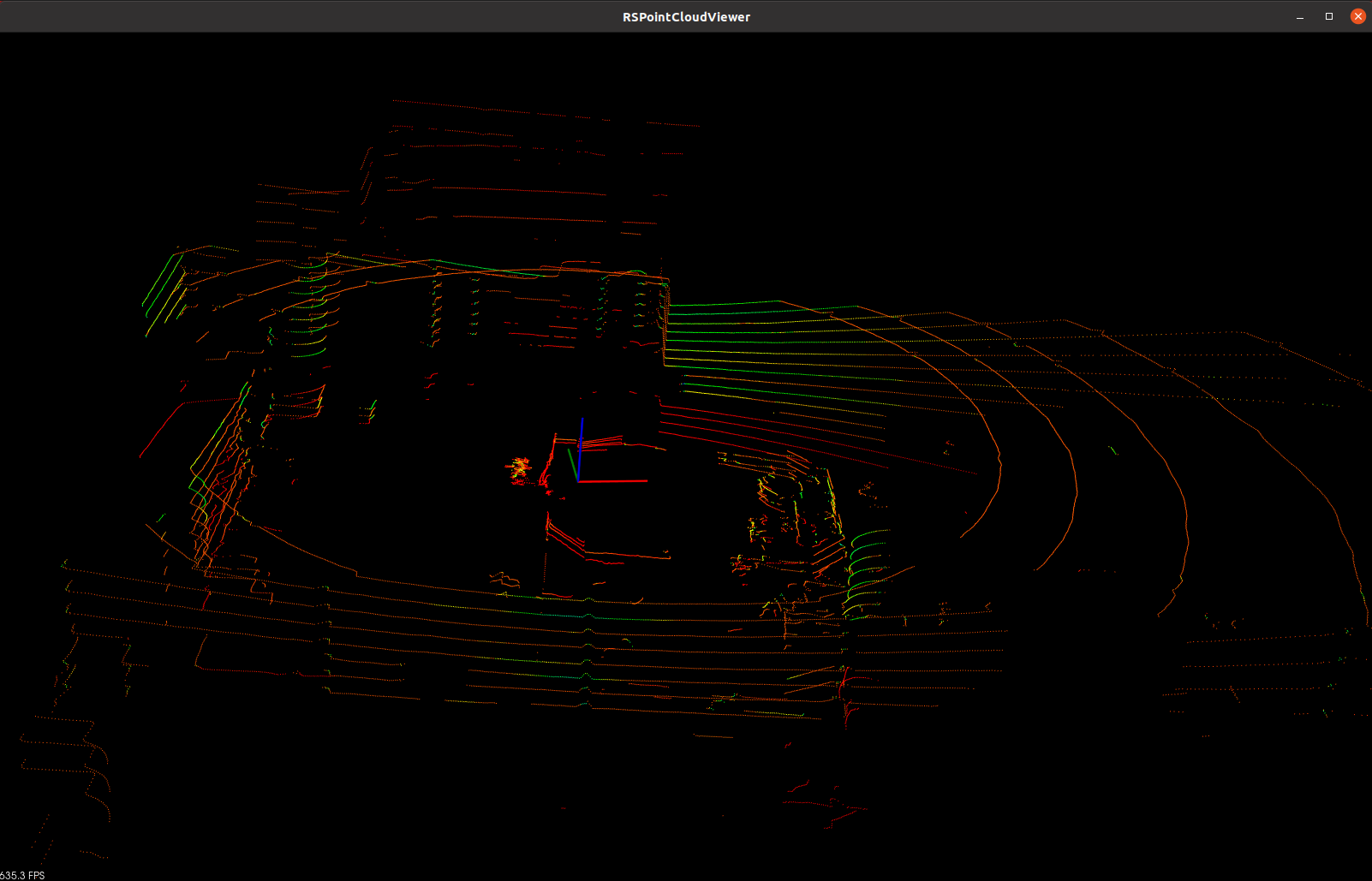
sudo systemctl disable --now firewalld重新查看点云显示正常:
解决方案:
关闭Ubuntu22的firewalld防火墙
sudo systemctl disable --now firewalld
参考:
Ubuntu 22.04 上的 CloudViewer 与 PCL 1.12.1 和 VTK 9.1 发生段错误
速腾RS32 + Ubuntu22.04 + ROS2-humble
