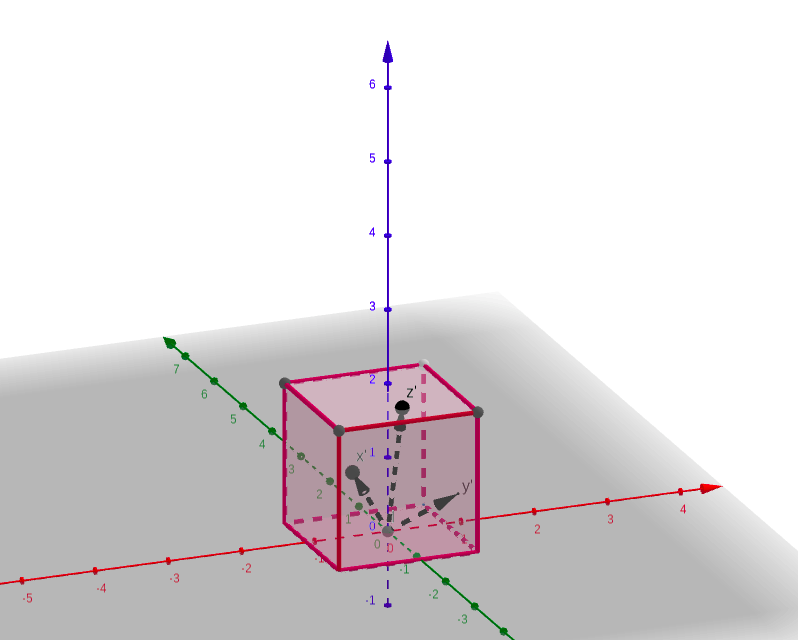
在使用LIO-SAM进行Lidar+IMU建图之前,需要做两个标定工作,IMU内参标定和Lidar-IMU外参标定。IMU内参标定,可以解决其固有的测量误差问题;Lidar和IMU的外参标定(以下简称“外参标定”)。外参标定的目的是获得激光雷达和IMU之间的位置转换关系,其中包括平移关系和旋转关系,分别对应最终输出结果中的平移向量与旋转矩阵。
在使用LIO-SAM进行Lidar+IMU建图之前,需要做两个标定工作,IMU内参标定和Lidar-IMU外参标定。IMU内参标定,可以解决其固有的测量误差问题;Lidar和IMU的外参标定(以下简称“外参标定”)。外参标定的目的是获得激光雷达和IMU之间的位置转换关系,其中包括平移关系和旋转关系,分别对应最终输出结果中的平移向量与旋转矩阵。
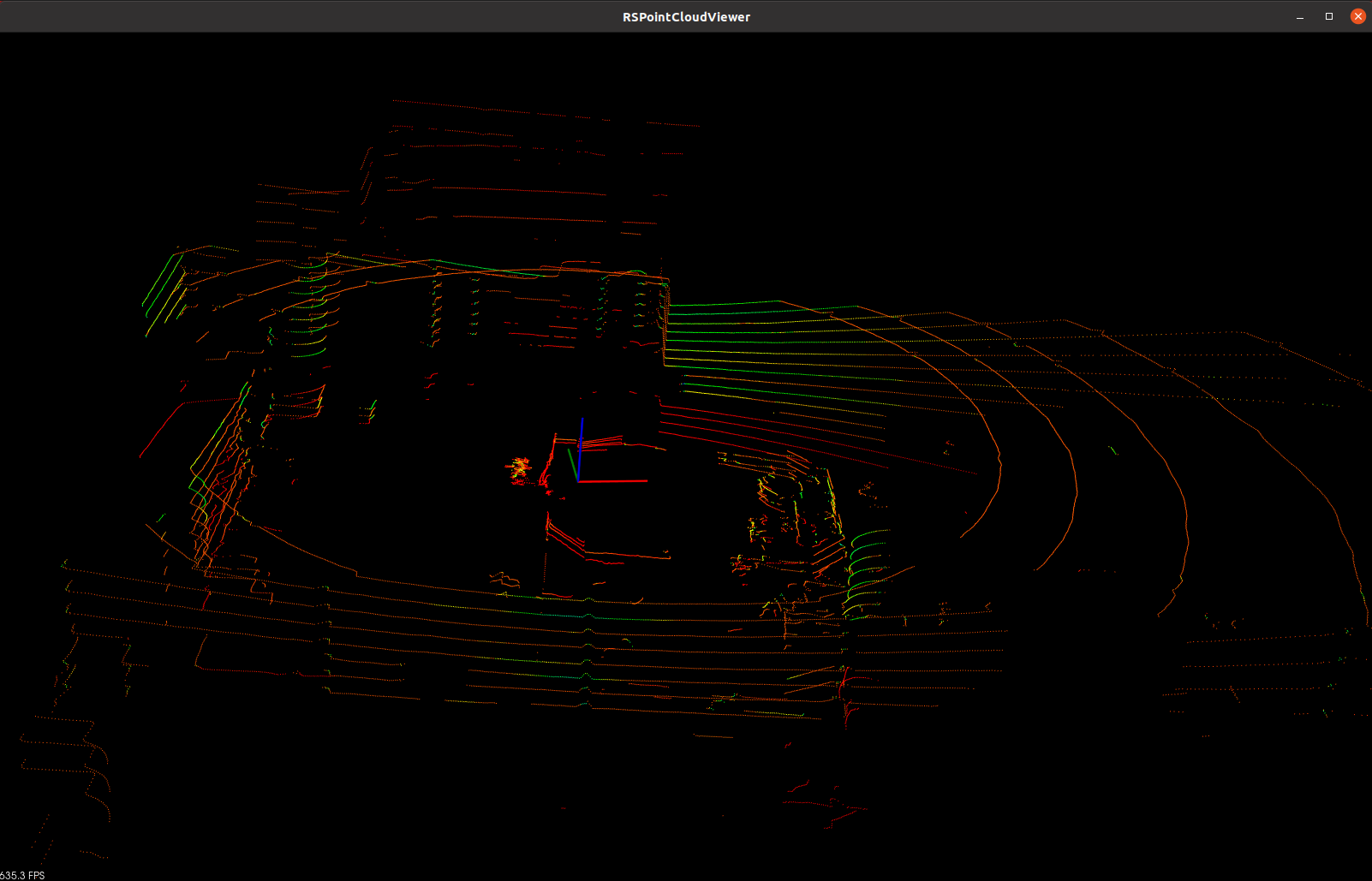
在Ubuntu 22.04上调试RS16的3D建图,发现ROS2无法正常显示点云,尝试使用官方的RSView工具也无法正常显示点云。
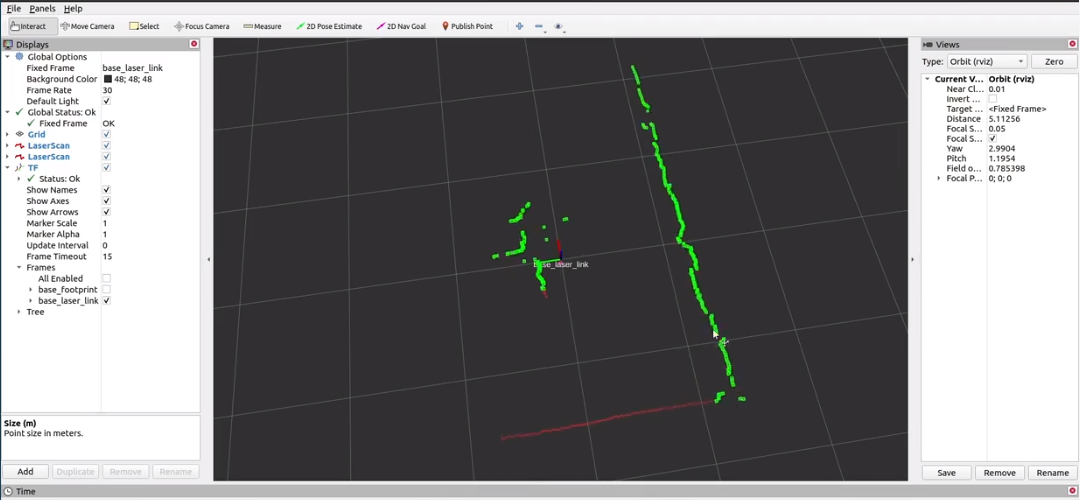
激光雷达通常可以检测360度等范围内的物体,但由于机械结构设计等原因,机器人本体可能会遮挡部分激光雷达扫描数据。如果将激光雷达原始点云直接用于建图或导航,则机器人本体的一部分会被当作障碍物导致建图或导航无法正常工作。
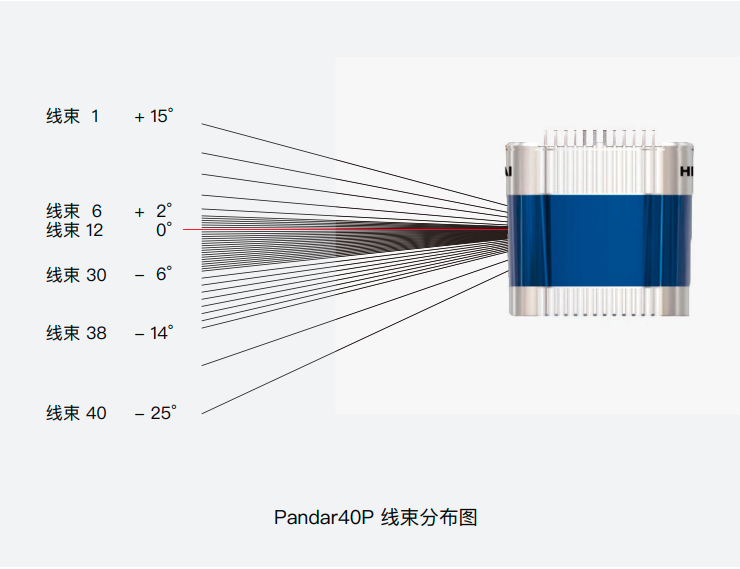
Pandar40P是一款机械旋转式40线激光雷达,其内部包含40个激光器,通过360°旋转实现3D成像。Pandar40P独特的角度分布,使其更加适用于自动驾驶。