一、概述
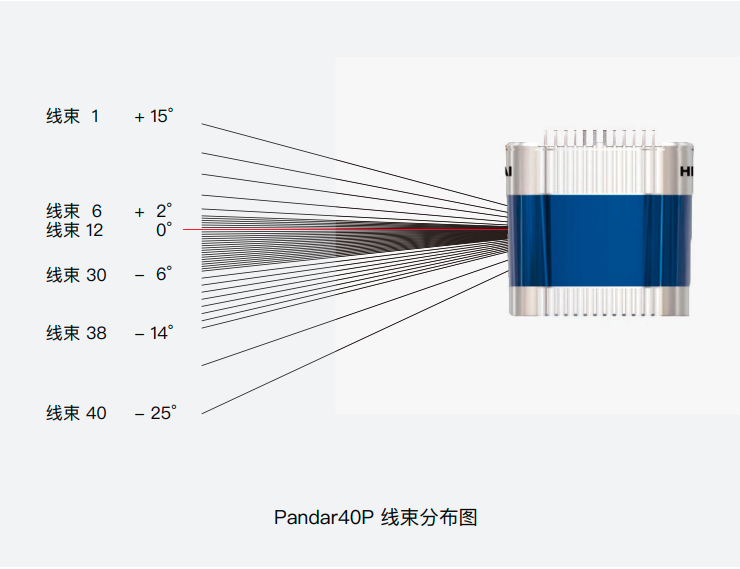
Pandar40P是一款机械旋转式40线激光雷达,其内部包含40个激光器,通过360°旋转实现3D成像。Pandar40P独特的角度分布,使其更加适用于自动驾驶。
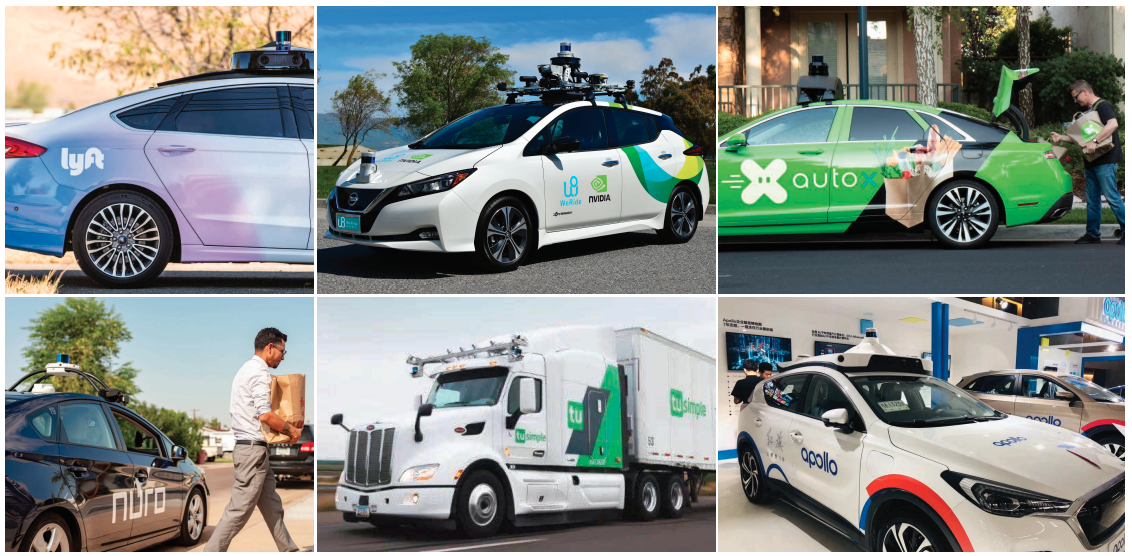
Pandar40P不仅经过严格的精度、测距等出厂性能测试,还通过了振动、跌落、温度、湿度、老化、电气等多维度可靠性测试,产品稳定性得到充分保证。目前已在国内外自动驾驶、高精地图、仓储物流等场景下广泛使用。
应用场景:

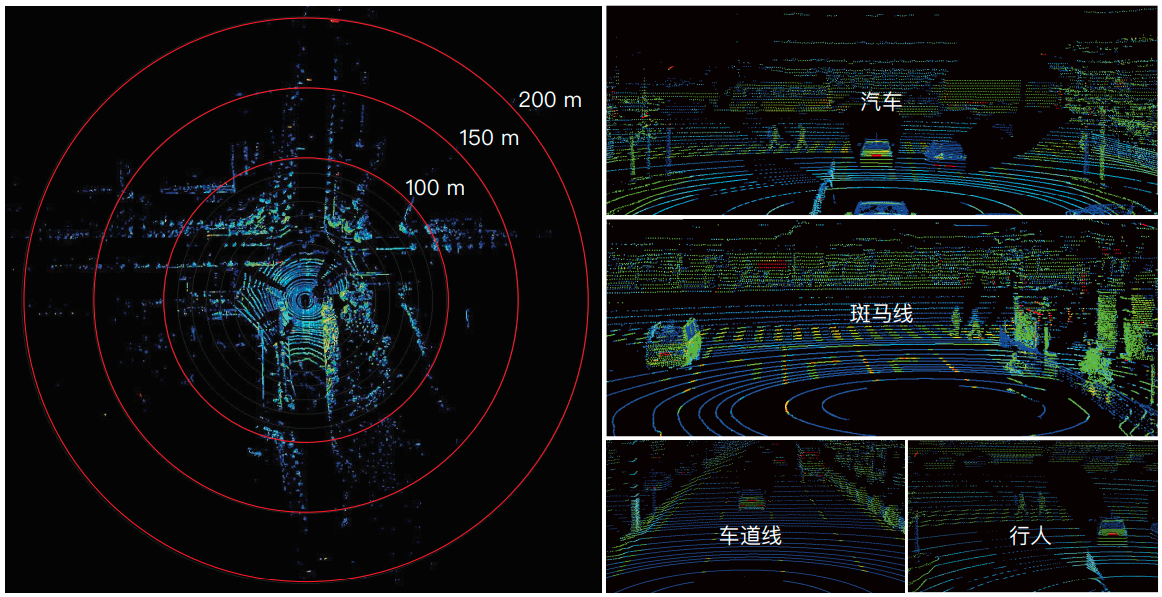
点云:
二、准备工作
1. 雷达SDK与ROS包
# 配置ros源(ustc的源最好最快)
sudo sh -c '. /etc/lsb-release && echo "deb [arch=$(dpkg --print-architecture)] http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
# 添加公钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
# 安装ros桌面版
sudo apt update
sudo apt install ros-noetic-desktop-full
# 设置环境
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
# 准备源码
mkdir -p ~/catkin_ws/src
cd catkin_ws/src/
git clone https://github.com/HesaiTechnology/HesaiLidar_General_SDK.git
git clone https://github.com/HesaiTechnology/HesaiLidar_General_ROS.git --recursive
# 安装依赖
sudo apt install libpcap-dev libyaml-cpp-dev python-catkin-tools
# 编译
cd ~/catkin_ws
catkin_make
# source
echo "source /home/work/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
echo $ROS_PACKAGE_PATH2. 雷达连线
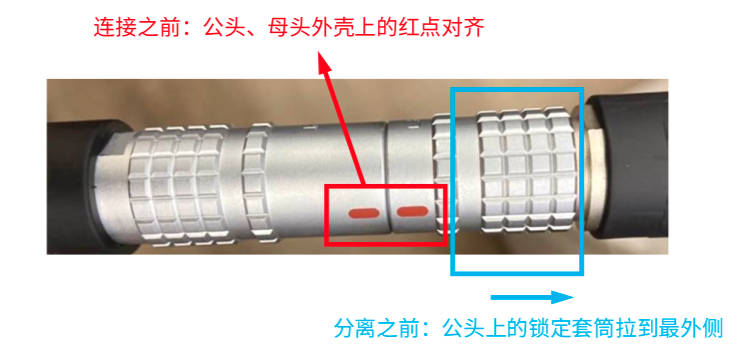
连接Lemo连接器:
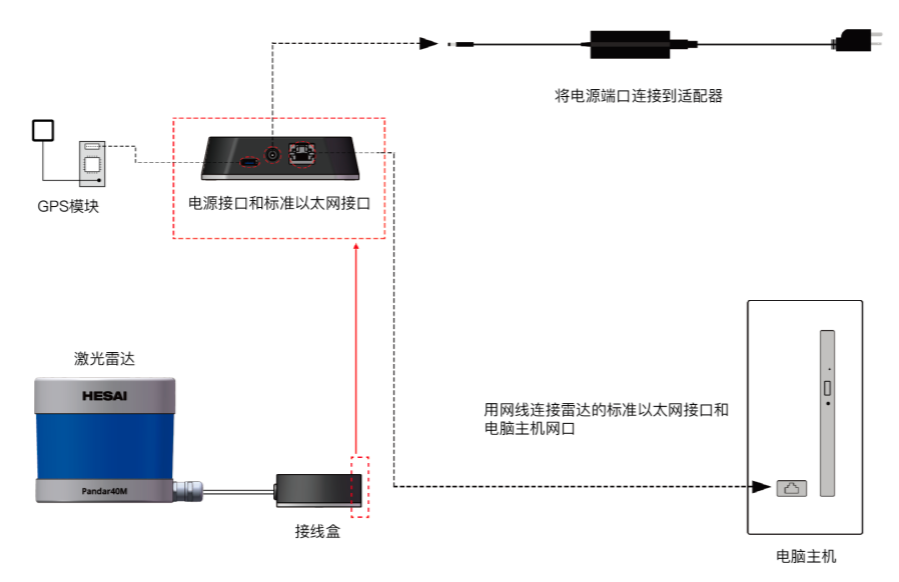
物理连线:(gps模块可选)

3. 网络配置
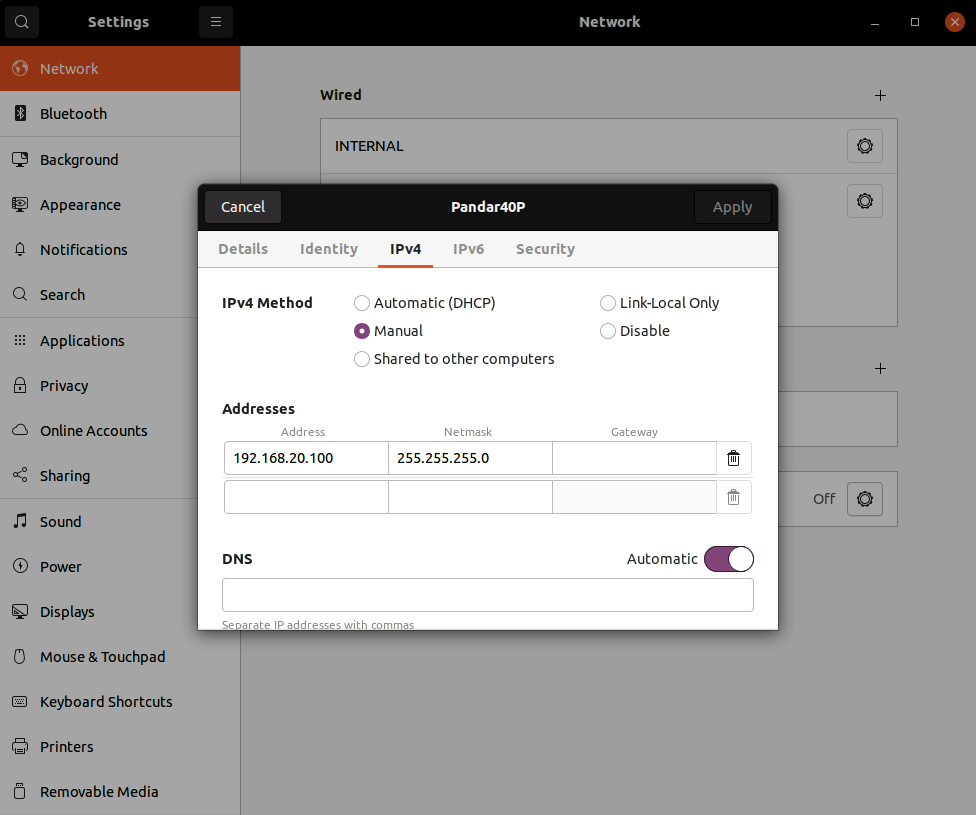
插上雷达网线后,在Network-Wired里新建一个名为Pandar40P的有线网络,IPv4手动设置为192.168.20.100(新雷达默认192.168.1.x网段,因为我拿到的这个雷达IP被改为192.168.20.14了,所以PC也要设置在20网段才能通信),子网掩码设置为255.255.255.0,保存后点击连接。
 查看ip配置是否生效,并ping 192.168.20.14雷达ip看能否ping通。(如果你是新雷达,应该ping雷达默认IP:192.168.1.201)
查看ip配置是否生效,并ping 192.168.20.14雷达ip看能否ping通。(如果你是新雷达,应该ping雷达默认IP:192.168.1.201)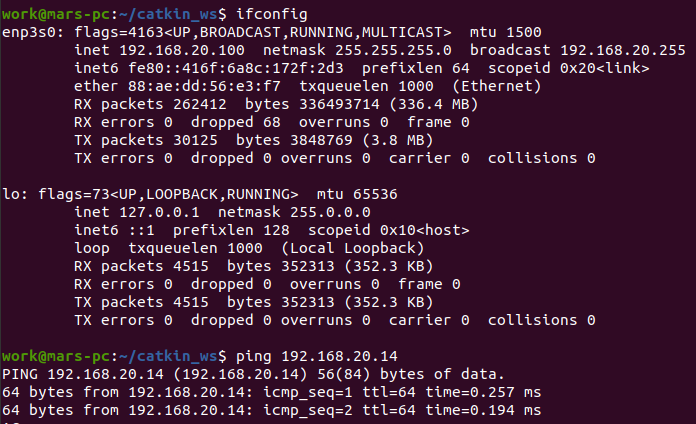
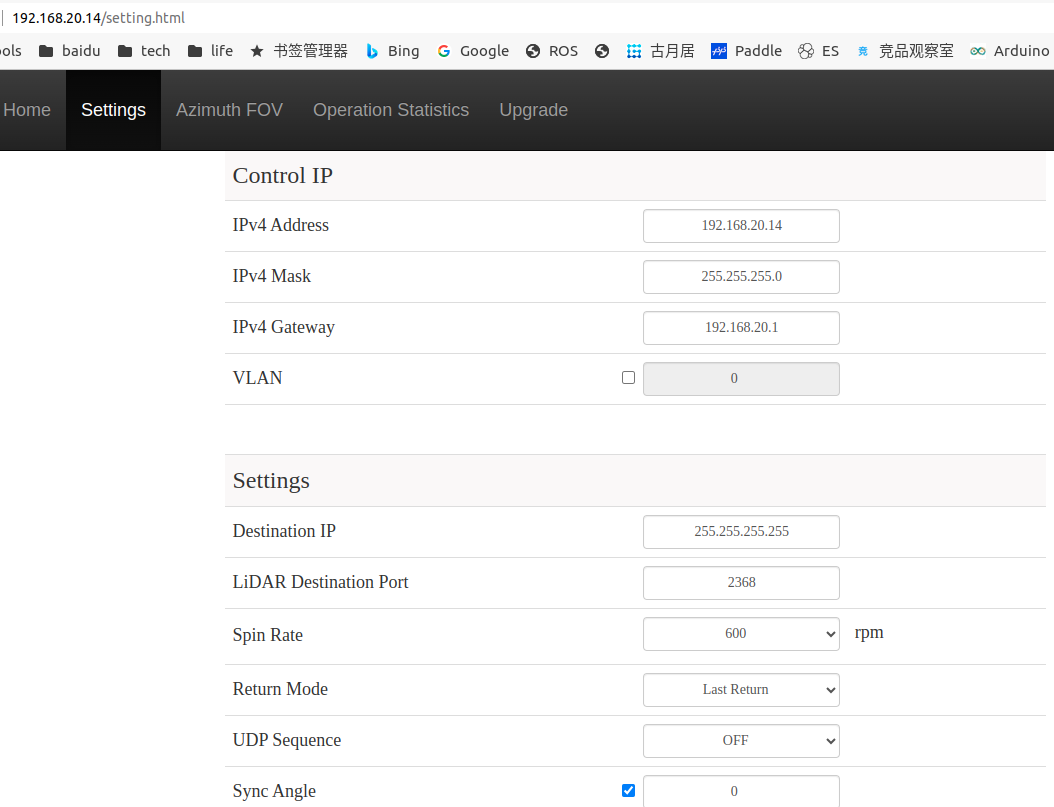
ping通过,可以直接访问雷达内部后台:http://192.168.20.14/setting.html(ip根据自己雷达修改)
三、雷达调试
1. 修改ros配置
vim ~/catkin_ws/src/HesaiLidar_General_ROS/launch/hesai_lidar.launch
...
<arg name="server_ip" default="192.168.20.14"/>
<arg name="frame_id" default="Pandar40P"/>
<arg name="lidar_correction_file" default="$(find hesai_lidar)/config/Pandar40P.csv"/>
...
2. 点云测试
启动雷达驱动:
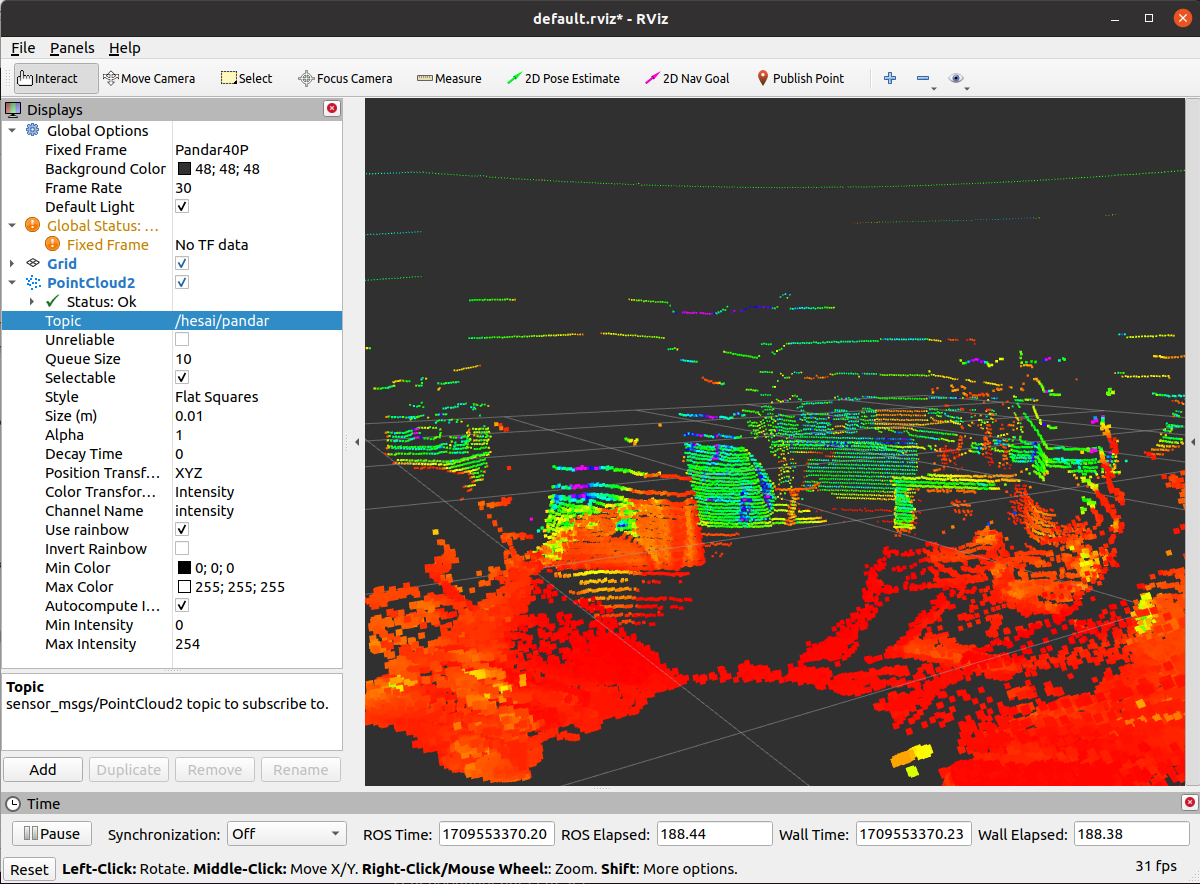
roslaunch hesai_lidar hesai_lidar.launch打开点云可视化界面:
rosrun rviz rviz修改rviz配置,即可看到扫描的点云:
- Global配置中FixedFrame:修改为Pandar40P(上边launch文件里配置的frame_id)
- Add一个PointCloud2:Topic选择/hesai/pandar
下一次,我将带大家使用Pandar40P在室外进行SLAM地图构建和自动导航。如果你对什么感兴趣可以告诉我~
yan 24.3.4
参考:
