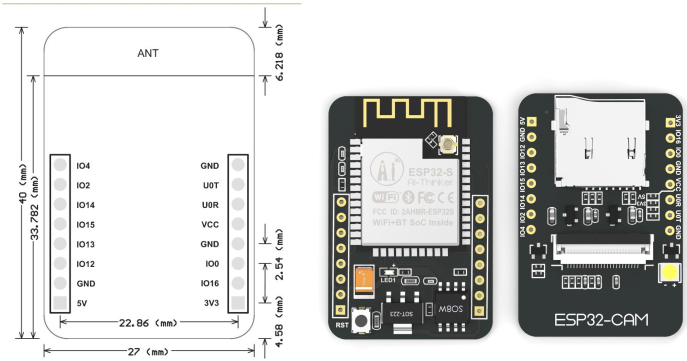
打算做个远程图传+底盘控制的物联网设备,uno的板子没有联网功能,esp8266、esp32成为两个比较好的选择,因为esp32是8266的升级版,我们这里就直接采用esp32-cam板进行测试。
打算做个远程图传+底盘控制的物联网设备,uno的板子没有联网功能,esp8266、esp32成为两个比较好的选择,因为esp32是8266的升级版,我们这里就直接采用esp32-cam板进行测试。

最近调研4G图传控制模组,发现一个不错的wifi图传模块,用起来很简单,但是只能基于模组自身的wifi信号传输而不能走4G。虽然没能满足4G的需求,但是依然可以在很多场景发挥作用,比如近场遥控汽艇、潜艇、无人机、坦克的视频监控,Wifi 2.4G的信号也还是可以传很远距离的,既然还有这么多应用场景,这里就记录下模组的设计和使用方法吧,方便做小玩意时用。
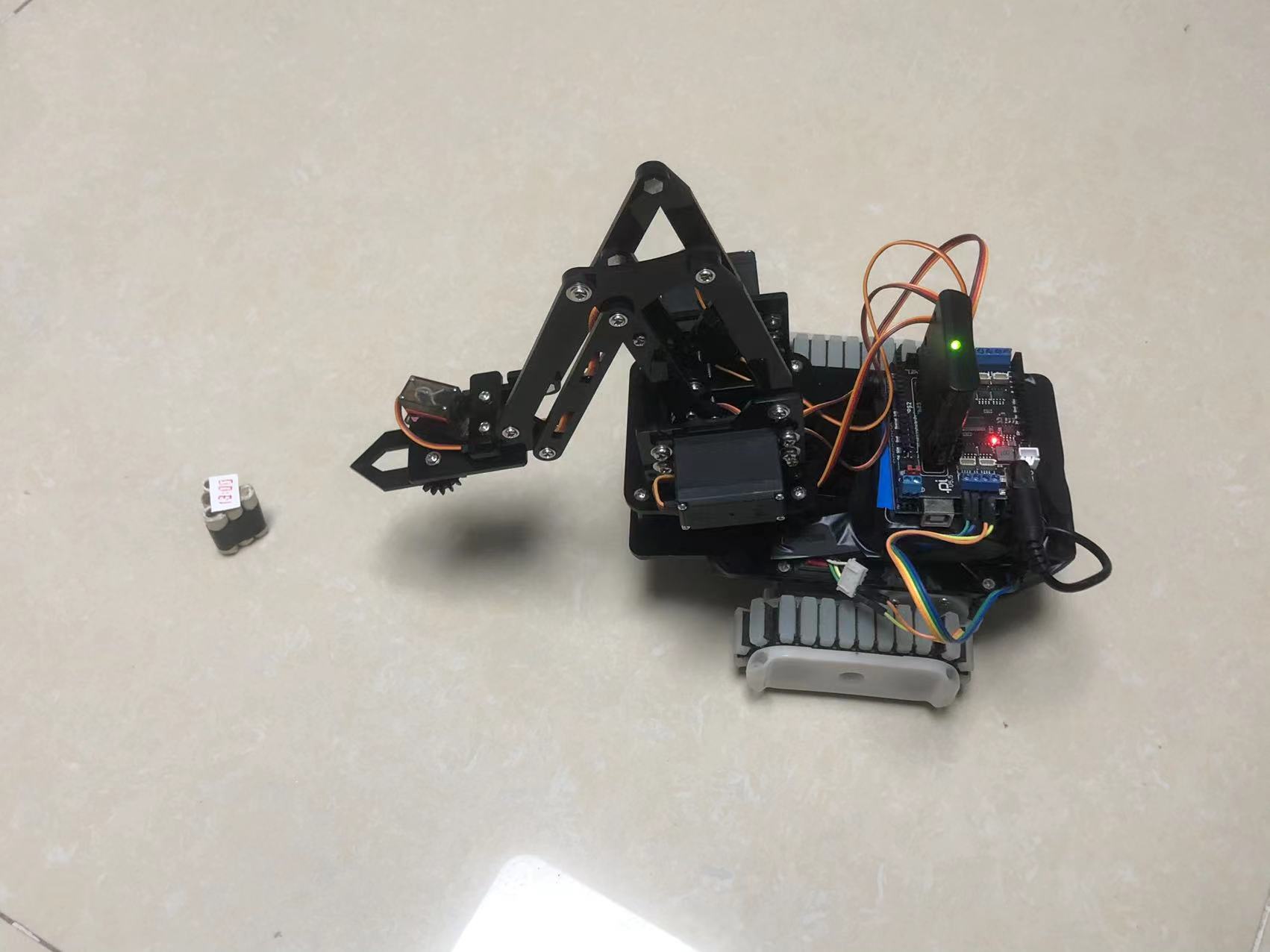
五一疫情防控不能外出,呆在家里实在无聊,决定跟儿子一起做个排爆机器人,需要同时控制4个舵机、2个底盘电机、1个无线手柄的控制和接收,但L298P只有1个伺候,再外挂个16路舵机板的话有点太乱了。偶然间看到一块功能比较全面的驱动板,可以同时驱动电机、舵机、蓝牙、超声波等,我们就使用这块板子尝试做个排爆机器人。

我们在做机器人调试时,只能通过串口发命令来控制,有时跟着出门了还得带着电脑,实在很不方便,今天来教大家如何使用PS2手柄来直接控制Arduino设备。

我们完成SLAM建图后,如何在导航时让自己的底盘正常工作,是很多新手面临的问题。上位机大家通常采用pi或nvidia jetson nano甚至更强算力的板子,系统一般采用ubuntu,这使得上位机的库几乎是通用的;而底盘不同,单片机有stm32、arduino、51等,电机的种类就更多了,电机的精准度和质量参差不齐,容易在底盘动起来后难以实现精准控制。如何利用电机编码器进行精准的底盘移动并上报odom,不少人会在这里花费大量时间,本文将针对此类问题进行具体讲解。

最近学习ROS,涉及底盘移动等执行机构时,发现买robot套件太贵了,又懒得从pi上直接开发,翻箱倒柜找到一个以前跟儿子一起做的arduino履带坦克,就拿它作ros机器人的action执行机构吧。
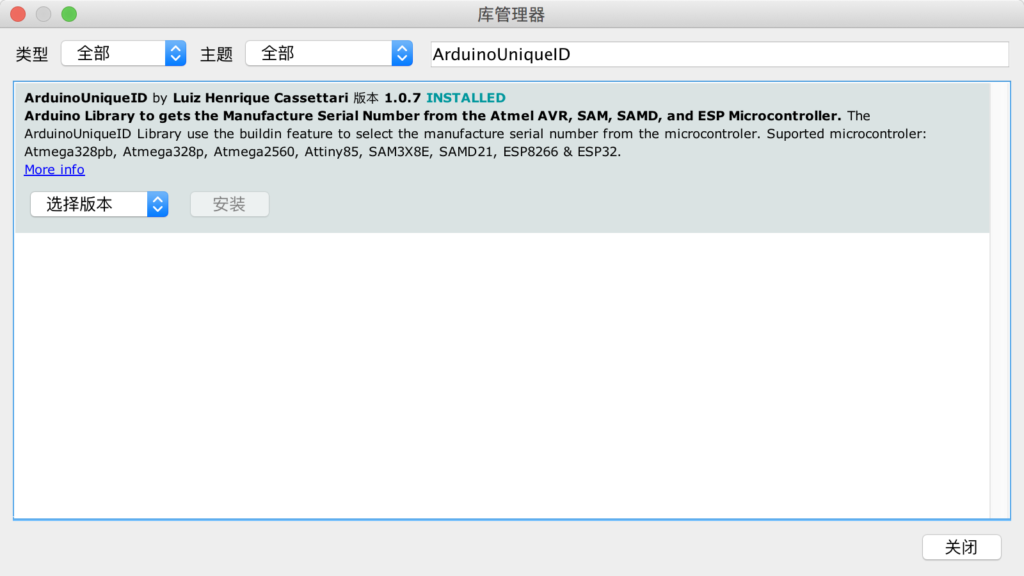
在多终端通信时,如果想在服务端确定是哪个设备的请求,就需要硬件有一个唯一的标识。但是arduino并没有内置这样的函数,google了一下,找到一个封装的比较好的包:ArduinoUniqueID
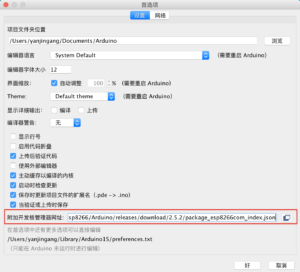
周末翻抽屉,发现一块n年前买的espduino板子,老实说其实当时是买错了,一直丢在那。今天刚好要在pc/pi上给arduino发指令,手上没有多余的esp8266模块,就拿这个板子来用吧,顺便把esp8266模块的使用方法整理一下。
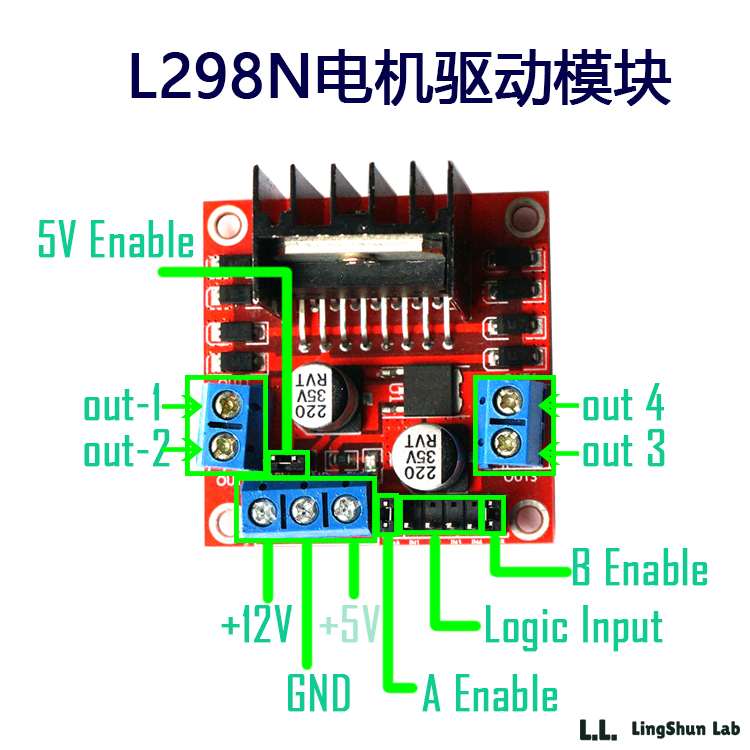
L298N驱动模块,可以驱动2个直流电机,可分别实现正转,反转功能。
上一篇,我们尝试了 DS3231高精度时钟模块的使用 ,今天我们试一下这个芯片集成的数字温度传感器(传感器每64秒采集一次,精度为±3℃)。
arduino是个功能很弱的单片机,自身没有获得当前时间的功能。仅有的mills()记录系统运行时长函数在49天左右后也会溢出而重置,无法用于时钟,故只能外加一个时钟芯片。
本次实验使用arduino直接驱动1602液晶显示字母。 1602液晶在应用中非常广泛,最初的1602液晶使用的是HD44780控制器,现在各个厂家的1602模块基本上都是采用了与之兼容的IC,所以特性上基本都是一致的。
上一篇,我们为6足虫的制作提前准备研究了下 舵机的使用 ,这次,我们开始动手,实现我们的机械6脚虫虫。

上一篇文章我们讲到了使用红外线发射和接收装置控制led,儿子看后表示能不能做个遥控器控制一个小虫子走路,研究了一下,打算用两个舵机实现,每个舵机负责虫子的两只脚。本文先用学习一下舵机的使用,并用两个舵机测试一下这种想法的可行性。为了降低测试成本,在某宝5块多的价格买了几个9g的微型舵机。
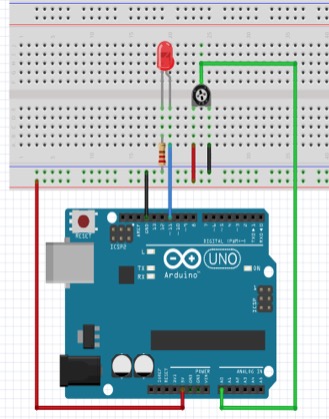
之前我们学习了如何 使用开关控制led灯,这次我们尝试用红外线发射接收装置代替开关 来远程控制led灯。
Pulse Width Modulation 就是通常所说的PWM,译为脉冲宽度调制,简称脉宽调制。脉冲宽度调制(PWM)是一种对模拟信号电平进行数字编码的方法,由于计算机不能输出模拟电压,只能输出0 或5V 的的数字电压值,我们就通过使用高分辨率计数器,利用方波的占空比被调制的方法来对一个具体模拟信号的电平进行编码。
上一篇,我们学习了如何使用开关控制led灯,这一次,我们学习一下如何使用蜂鸣器。

在上一篇arduino学习之—led灯控制中,我们做了用输出口高低电瓶控制led闪烁的尝试,并使用pc发送指令的方法控制led的熄灭。

这里使用arduino UNO r3板子+7个电阻+7个led来学习如何实现定时闪烁和顺序亮起。

板子检测监听指定端口,收到‘R’指令时,闪烁LED500毫秒,并打印‘Hello World!’。