周末翻抽屉,发现一块n年前买的espduino板子,老实说其实当时是买错了,一直丢在那。今天刚好要在pc/pi上给arduino发指令,手上没有多余的esp8266模块,就拿这个板子来用吧,顺便把esp8266模块的使用方法整理一下。
*注:以下方法适用于任何使用esp8266模块的arduino板子,不论是集成还是外置esp8266的情形(开发版根据实际情况选择即可)。
esp8266模块使用方法如下:
1.安装依赖
brew install gnu-sed --with-default-names
brew install binutils coreutils automake autoconf wget gawk libtool help2man gperf grep2.找到esp8266在arduino的最新releases(用于IDE识别开发版)
https://github.com/esp8266/Arduino/releases
3.附加开发版设置
*IDE和CH341驱动的安装方法详见:https://blog.yanjingang.com/?p=721
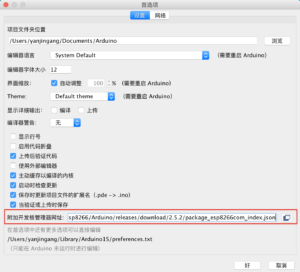
打开Arduino IDE,“Arduino-Preferences-附加开发版管理网址”,填写esp8266开发包配置地址:
http://arduino.esp8266.com/stable/package_esp8266com_index.json
或
https://github.com/esp8266/Arduino/releases/download/2.5.2/package_esp8266com_index.json
4.安装esp8266开发版插件
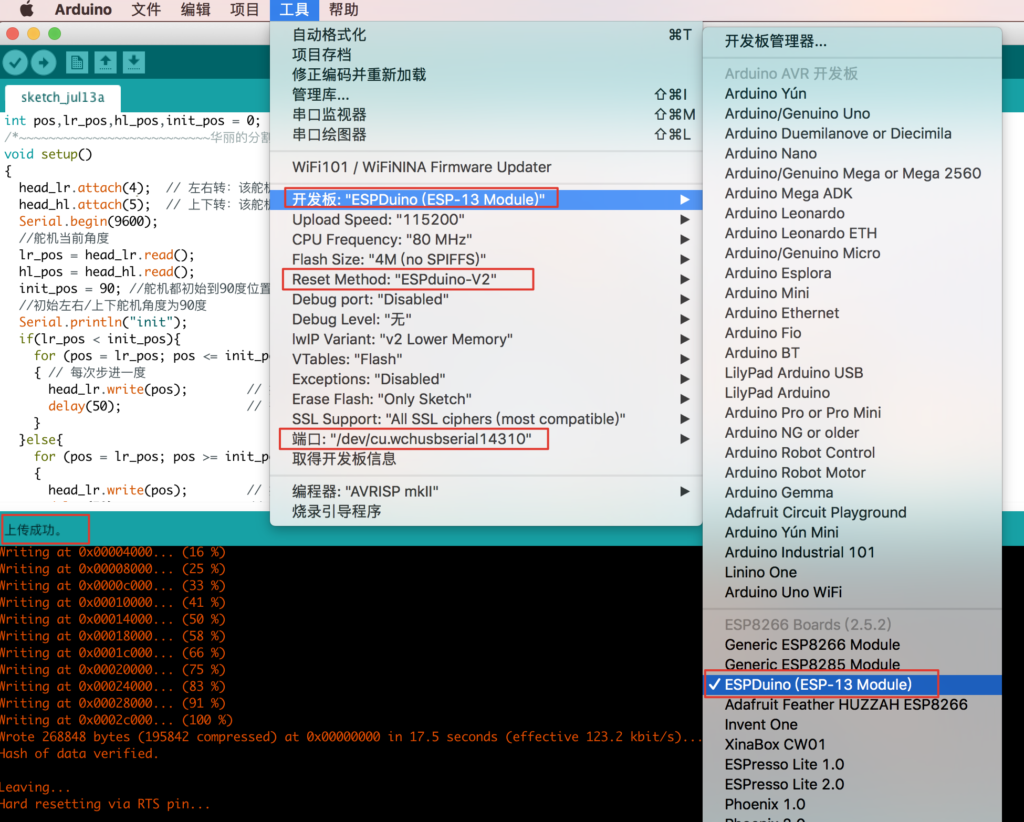
打开Arduino IDE,“工具-开发版-开发版管理器”,搜索esp8266,点击安装。安装完毕后重启IDE。

如果因墙的原因总是下载失败,可以配置vpn后重新安装即可

5.测试wifi通信
开发版选择“ESPDuino(ESP-13 Module)”,Reset Medth选“ESPduino V2”,选择端口后测试烧录。
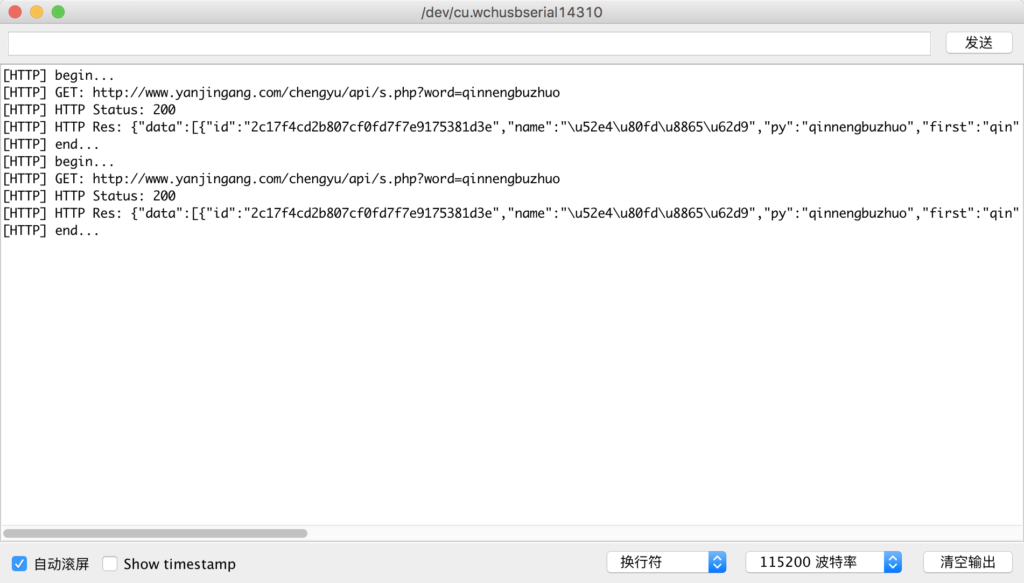
5.1 arduino向外发送http请求:
//http请求示例
#include <Arduino.h>
#include <ESP8266WiFi.h>
#include <ESP8266WiFiMulti.h>
#include <ESP8266HTTPClient.h>
#include <WiFiClient.h>
ESP8266WiFiMulti WiFiMulti;
void setup() {
Serial.begin(115200);
// Serial.setDebugOutput(true);
Serial.println();
Serial.println();
Serial.println();
/*
for (uint8_t t = 4; t > 0; t--) {
Serial.printf("[SETUP] WAIT %d...\n", t);
Serial.flush();
delay(1000);
}
*/
WiFi.mode(WIFI_STA);
WiFiMulti.addAP("MARS.Y", "lovezhu1314"); //wifi 名称/密码
}
void loop() {
// wait for WiFi connection
if ((WiFiMulti.run() == WL_CONNECTED)) {
WiFiClient client;
HTTPClient http;
Serial.print("[HTTP] begin...\n");
String url = "http://www.yanjingang.com/chengyu/api/s.php?word=qinnengbuzhuo";
if (http.begin(client, url)) { // HTTP
Serial.printf("[HTTP] GET: %s\n", url.c_str());
// start connection and send HTTP header
int httpCode = http.GET();
// httpCode will be negative on error
if (httpCode > 0) {
// HTTP header has been send and Server response header has been handled
Serial.printf("[HTTP] HTTP Status: %d\n", httpCode);
// file found at server
if (httpCode == HTTP_CODE_OK || httpCode == HTTP_CODE_MOVED_PERMANENTLY) {
String payload = http.getString();
Serial.printf("[HTTP] HTTP Res: %s\n", payload.c_str());
}
} else {
Serial.printf("[HTTP] GET failed, error: %s\n", http.errorToString(httpCode).c_str());
}
http.end();
Serial.print("[HTTP] end...\n");
} else {
Serial.printf("[HTTP} Unable to connect\n");
}
}
delay(10000);
}测试效果:
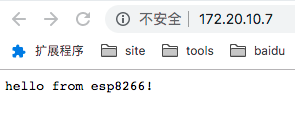
5.2 arduino作为http server接收来自外部的请求:
//arduino作为http server接收外部请求
#include <ESP8266WiFi.h>
#include <WiFiClient.h>
#include <ESP8266WebServer.h>
#include <ESP8266mDNS.h>
#ifndef STASSID
#define STASSID "MARS.Y"
#define STAPSK "lovezhu1314"
#endif
const char* ssid = STASSID;
const char* password = STAPSK;
ESP8266WebServer server(80);
const int led = 13;
void handleRoot() {
digitalWrite(led, 1);
server.send(200, "text/plain", "hello from esp8266!");
Serial.println("get / root request!");
digitalWrite(led, 0);
}
void handleNotFound() {
digitalWrite(led, 1);
String message = "File Not Found\n\n";
message += "URI: ";
message += server.uri();
message += "\nMethod: ";
message += (server.method() == HTTP_GET) ? "GET" : "POST";
message += "\nArguments: ";
message += server.args();
message += "\n";
for (uint8_t i = 0; i < server.args(); i++) {
message += " " + server.argName(i) + ": " + server.arg(i) + "\n";
}
server.send(404, "text/plain", message);
digitalWrite(led, 0);
}
void setup(void) {
pinMode(led, OUTPUT);
digitalWrite(led, 0);
Serial.begin(115200);
WiFi.mode(WIFI_STA);
WiFi.begin(ssid, password);
Serial.println("");
// Wait for connection
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
}
Serial.println("");
Serial.print("Connected to ");
Serial.println(ssid);
Serial.print("IP address: ");
Serial.println(WiFi.localIP());
if (MDNS.begin("esp8266")) {
Serial.println("MDNS responder started");
}
server.on("/", handleRoot);
server.on("/test", []() {
server.send(200, "text/plain", "this works as well");
Serial.println("get /test request!");
});
server.onNotFound(handleNotFound);
server.begin();
Serial.println("HTTP server started");
}
void loop(void) {
server.handleClient();
MDNS.update();
}测试效果-server的ip和接收到的请求:(可以根据收到的请求执行相应硬件操作)

局域网向arduino发送请求:

5.3 arduino机器人头部云台接受外部指令控制(头部左转/右转/低头抬头):
vim head_control.ino
/*
* arduino头部云台控制器(作为http server接收外部请求)
* 当前云台舵机角度:http://172.20.10.7/head_control/getpos
* 左转:http://172.20.10.7/head_control/left?degrees=10
* 右转:http://172.20.10.7/head_control/right?degrees=10
* 抬头:http://172.20.10.7/head_control/up?degrees=10
* 低头:http://172.20.10.7/head_control/down?degrees=10
*/
#include <ESP8266WiFi.h>
#include <ESP8266WiFiMulti.h>
#include <ESP8266HTTPClient.h>
#include <WiFiClient.h>
#include <ESP8266WebServer.h>
#include <ESP8266mDNS.h>
#include <Servo.h>
#include <ArduinoUniqueID.h>
//wifi名称/密码配置
#ifndef STASSID
#define STASSID "MARS.Y"
#define STAPSK "Lovezhu1314"
#endif
const char* ssid = STASSID;
const char* password = STAPSK;
//webserver,监听80端口
ESP8266WebServer server(80);
//wifi client,负责向外发送http请求
ESP8266WiFiMulti WiFiMulti;
//头部云台舵机控制对象
Servo head_leftright,head_updown;
//舵机端口
const int pin_lefright = 4; //左右扭脸舵机引脚
const int pin_updown = 5; //上下抬头低头舵机引脚
const int pos_init = 90; //舵机初始角度
//指示灯
const int pin_led = 2; //指示灯引脚
String getArduinoUniqueId();
//设备唯一ID
const String uniqid = getArduinoUniqueId();
void setup(void) {
//0.控制台打印初始化
Serial.begin(115200);
//1.指示灯初始化
pinMode(pin_led, OUTPUT);
digitalWrite(pin_led, 0);
//2.舵机初始化
Serial.println("init servo...");
head_leftright.attach(pin_lefright);
head_updown.attach(pin_updown);
//初始左右/上下舵机角度为90度
initServo();
//3.wifi客户端初始化
WiFi.mode(WIFI_STA);
WiFiMulti.addAP(ssid, password);
//4.webserver初始化
WiFi.begin(ssid, password);
while (WiFi.status() != WL_CONNECTED) { // Wait for connection
delay(500);
Serial.print(".");
}
String host = WiFi.localIP().toString();
Serial.println("");
Serial.print("Connected to ");
Serial.println(ssid);
Serial.print("IP address: ");
Serial.println(host);
if (MDNS.begin("esp8266")) {
Serial.println("MDNS responder started");
}
//向服务端注册此设备信息
registerBoard(uniqid, ssid, host);
//api init
server.on("/head_control/getpos", getPos); //当前舵机角度
server.on("/head_control/left", headLeft); //左扭脸api
server.on("/head_control/right", headRight); //右扭脸api
server.on("/head_control/up", headUp); //抬头api
server.on("/head_control/down", headDown); //低头api
server.onNotFound(urlNotFound); //url错误
server.on("/", []() {
server.send(200, "text/plain", "Mars works!");
Serial.println("get / root request!");
});
//start
server.begin();
Serial.println("HTTP server started");
}
void loop(void) {
/*loop*/
server.handleClient();
MDNS.update();
}
void registerBoard(String uniqid, String ssid, String host){
/*向服务端注册此设备信息*/
if ((WiFiMulti.run() == WL_CONNECTED)) {
WiFiClient client;
HTTPClient http;
Serial.print("[HTTP] begin...\n");
String url = "http://www.yanjingang.com/robot/api/register_board.php?id="+uniqid+"&ssid="+ssid+"&host="+host+"";
if (http.begin(client, url)) { // HTTP
Serial.printf("[HTTP] GET: %s\n", url.c_str());
// start connection and send HTTP header
int httpCode = http.GET();
// httpCode will be negative on error
if (httpCode > 0) {
// HTTP header has been send and Server response header has been handled
Serial.printf("[HTTP] HTTP Status: %d\n", httpCode);
// file found at server
if (httpCode == HTTP_CODE_OK || httpCode == HTTP_CODE_MOVED_PERMANENTLY) {
String payload = http.getString();
Serial.printf("[HTTP] HTTP Res: %s\n", payload.c_str());
}
} else {
Serial.printf("[HTTP] GET failed, error: %s\n", http.errorToString(httpCode).c_str());
}
http.end();
Serial.print("[HTTP] end...\n");
} else {
Serial.printf("[HTTP} Unable to connect\n");
}
}
}
void initServo(){
/*初始左右/上下舵机角度为90度*/
int pos_leftright = head_leftright.read();
int pos_updown = head_updown.read();
//初始左右/上下舵机角度为90度
if(pos_leftright < pos_init){
for (int pos = pos_leftright; pos <= pos_init; pos += 1)
{ // 每次步进一度
head_leftright.write(pos); // 指定舵机转向的角度
delay(10); // 等待15ms让舵机到达指定位置
}
}else{
for (int pos = pos_leftright; pos >= pos_init; pos -= 1)
{
head_leftright.write(pos); // 指定舵机转向的角度
delay(10); // 等待15ms让舵机到达指定位置
}
}
if(pos_updown < pos_init){
for (int pos = pos_updown; pos <= pos_init; pos += 1)
{
head_updown.write(pos); // 指定舵机转向的角度
delay(10); // 等待15ms让舵机到达指定位置
}
}else{
for (int pos = pos_updown; pos >= pos_init; pos -= 1)
{
head_updown.write(pos); // 指定舵机转向的角度
delay(10); // 等待15ms让舵机到达指定位置
}
}
}
String getArduinoUniqueId(){
/*获得arduino板子硬件唯一ID*/
String uniqid = "";
for (size_t i = 0; i < UniqueIDsize; i++)
{
if( i > 0 and i < UniqueIDsize){
uniqid = uniqid + "-";
}
if (UniqueID[i] < 0x10){
uniqid = uniqid + "0";
}
uniqid = uniqid + String(UniqueID[i], HEX);
}
return uniqid;
}
String getArg(String arg){
/*获取url中的指定参数值*/
for (uint8_t i = 0; i < server.args(); i++) {
if(server.argName(i) == arg){
return server.arg(i);
}
}
return "";
}
int getIntArg(String arg){
/*获取url中的参数值(数值)*/
for (uint8_t i = 0; i < server.args(); i++) {
if(server.argName(i) == arg){
return server.arg(i).toInt();
}
}
return 0;
}
void getPos() {
/*获得头部两个舵机当前的角度*/
//舵机当前角度
int pos_leftright = int(head_leftright.read());
int pos_updown = int(head_updown.read());
server.send(200, "text/plain", "{\"id\":\"" + uniqid + "\",\"pos_leftright\":" + String(pos_leftright) + ",\"pos_updown\":" + String(pos_updown) + "}");
}
void headLeft() {
/*往左扭脸*/
digitalWrite(pin_led, 1);
//舵机当前角度
int pos_leftright = int(head_leftright.read());
server.send(200, "text/plain", "{\"id\":\"" + uniqid + "\",\"pos\":" + String(pos_leftright) + "}");
//参数中的度数
int degrees = getIntArg("degrees");
Serial.printf("turn left %d\n", degrees);
for (int pos = pos_leftright; pos <= pos_leftright+degrees; pos += 1) { // 每次步进一度
head_leftright.write(pos); // 指定舵机转向的角度
delay(10); // 等待15ms让舵机到达指定位置
}
digitalWrite(pin_led, 0);
}
void headRight() {
/*往右扭脸*/
digitalWrite(pin_led, 1);
//舵机当前角度
int pos_leftright = int(head_leftright.read());
server.send(200, "text/plain", "{\"id\":\"" + uniqid + "\",\"pos\":" + String(pos_leftright) + "}");
//参数中的度数
int degrees = getIntArg("degrees");
Serial.printf("turn right %d\n", degrees);
for (int pos = pos_leftright; pos >= pos_leftright-degrees; pos -= 1) { // 每次步进一度
head_leftright.write(pos); // 指定舵机转向的角度
delay(10); // 等待15ms让舵机到达指定位置
}
digitalWrite(pin_led, 0);
}
void headUp() {
/*抬头*/
digitalWrite(pin_led, 1);
//舵机当前角度
int pos_updown = int(head_updown.read());
server.send(200, "text/plain", "{\"id\":\"" + uniqid + "\",\"pos\":" + String(pos_updown) + "}");
//参数中的度数
int degrees = getIntArg("degrees");
Serial.printf("turn left %d\n", degrees);
for (int pos = pos_updown; pos <= pos_updown+degrees; pos += 1) { // 每次步进一度
head_updown.write(pos); // 指定舵机转向的角度
delay(10); // 等待15ms让舵机到达指定位置
}
digitalWrite(pin_led, 0);
}
void headDown() {
/*低头*/
digitalWrite(pin_led, 1);
//舵机当前角度
int pos_updown = int(head_updown.read());
server.send(200, "text/plain", "{\"id\":\"" + uniqid + "\",\"pos\":" + String(pos_updown) + "}");
//参数中的度数
int degrees = getIntArg("degrees");
Serial.printf("turn right %d\n", degrees);
for (int pos = pos_updown; pos >= pos_updown-degrees; pos -= 1) { // 每次步进一度
head_updown.write(pos); // 指定舵机转向的角度
delay(10); // 等待15ms让舵机到达指定位置
}
digitalWrite(pin_led, 0);
}
void urlNotFound() {
/*访问的url不存在*/
digitalWrite(pin_led, 1);
String message = "File Not Found\n\n";
message += "BOARD_ID: ";
message += uniqid;
message += "URI: ";
message += server.uri();
message += "\nMethod: ";
message += (server.method() == HTTP_GET) ? "GET" : "POST";
message += "\nArguments: ";
message += server.args();
message += "\n";
for (uint8_t i = 0; i < server.args(); i++) {
message += " " + server.argName(i) + ": " + server.arg(i) + "\n";
}
server.send(404, "text/plain", message);
digitalWrite(pin_led, 0);
}
访问api即可控制机器人头部:(degrees:转动度数)
* 左转:http://172.20.10.7/head_control/left?degrees=10
* 右转:http://172.20.10.7/head_control/right?degrees=10
* 抬头:http://172.20.10.7/head_control/up?degrees=10
* 低头:http://172.20.10.7/head_control/down?degrees=10
由于模块可能每次连接的wifi网段可能不同,一个最简单的方法就是当server启动时,把自己的设备id和ip发给一个固定的api,需要访问server的程序从这个api处获取指定设备id最新的ip地址即可。
5.4 摄像头追踪人脸效果:
另外生产环境中请求最好使用https以避免被轻易的嗅探。
yan 19.7.14 23:45
参考:
POST Nest API用于获取ESP8266或Arduino的访问令牌
