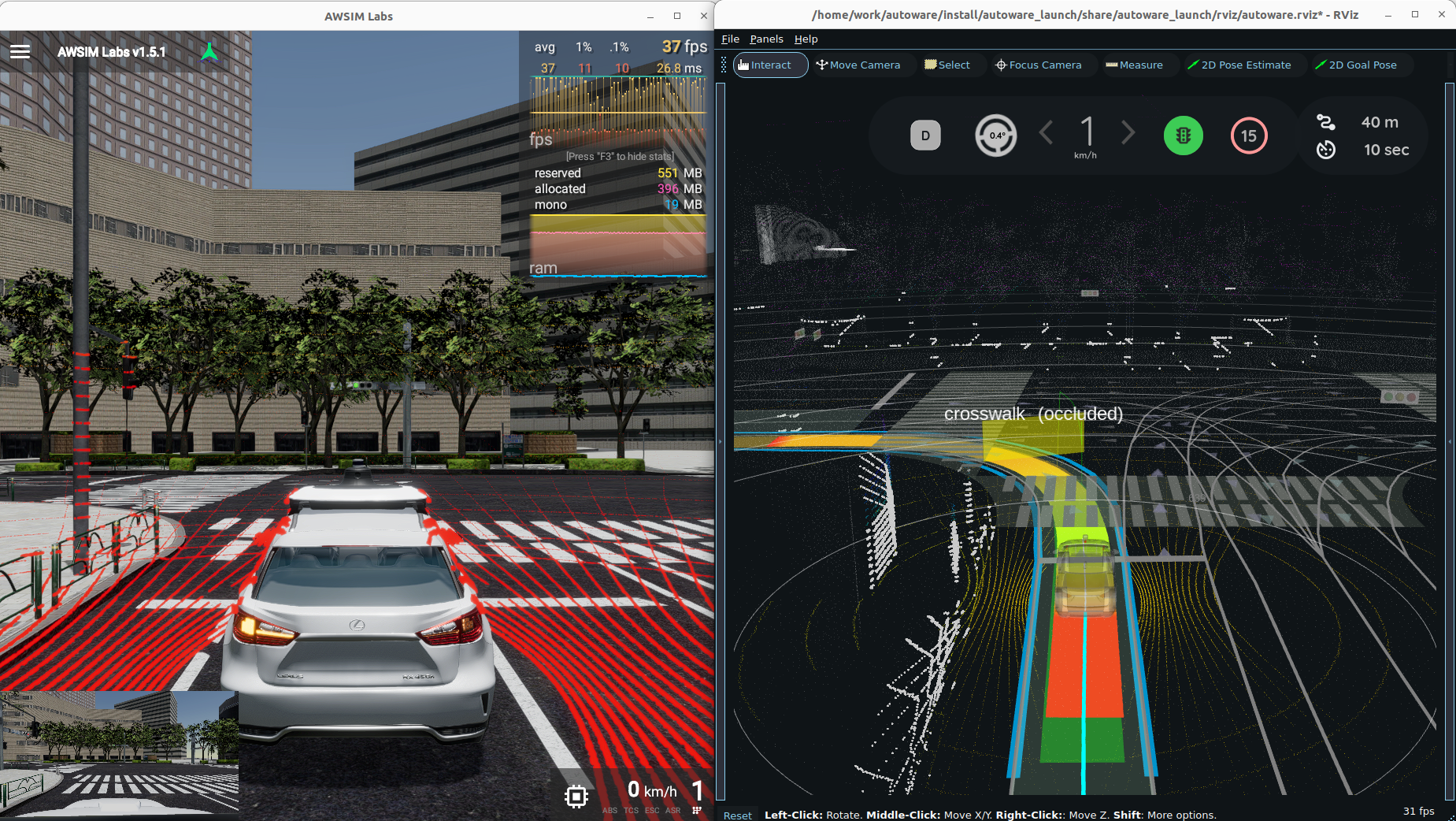
上次我们大概了解了Autoware是什么,以及它的基本原理。作为一个完备的自动驾驶框架,Autoware看起来很有吸引力,那么今天就带大家动手实践下,看它是不是像描述的那么好用。
上次我们大概了解了Autoware是什么,以及它的基本原理。作为一个完备的自动驾驶框架,Autoware看起来很有吸引力,那么今天就带大家动手实践下,看它是不是像描述的那么好用。
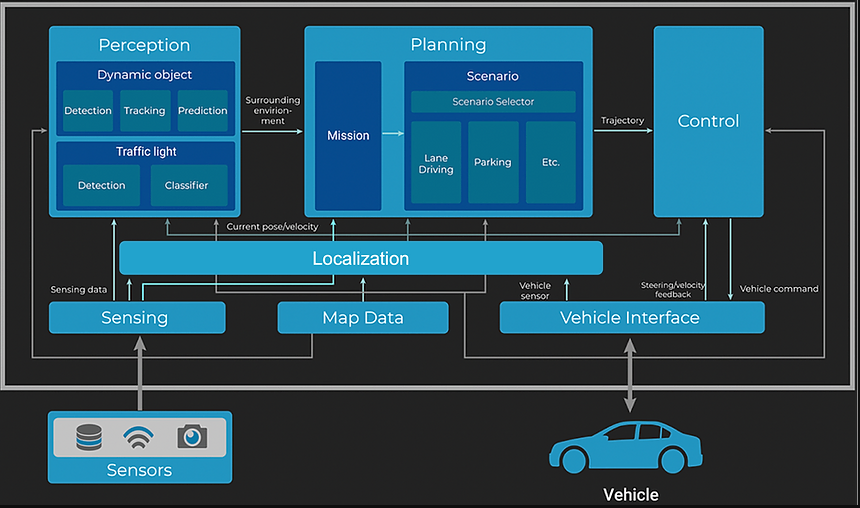
Autoware与Apollo类似,是2015年发布的开源自动驾驶项目,它基于机器人操作系统 ( ROS 2 ) ,包含Map Server、Sensor Drivers、Perception、Prediction、Localization、Planning、Control、Vehicle Interface、User Interface等完备的自动驾驶模块,对自动驾驶汽车在各种平台和应用程序上的商业部署起到了积极的推动作用。
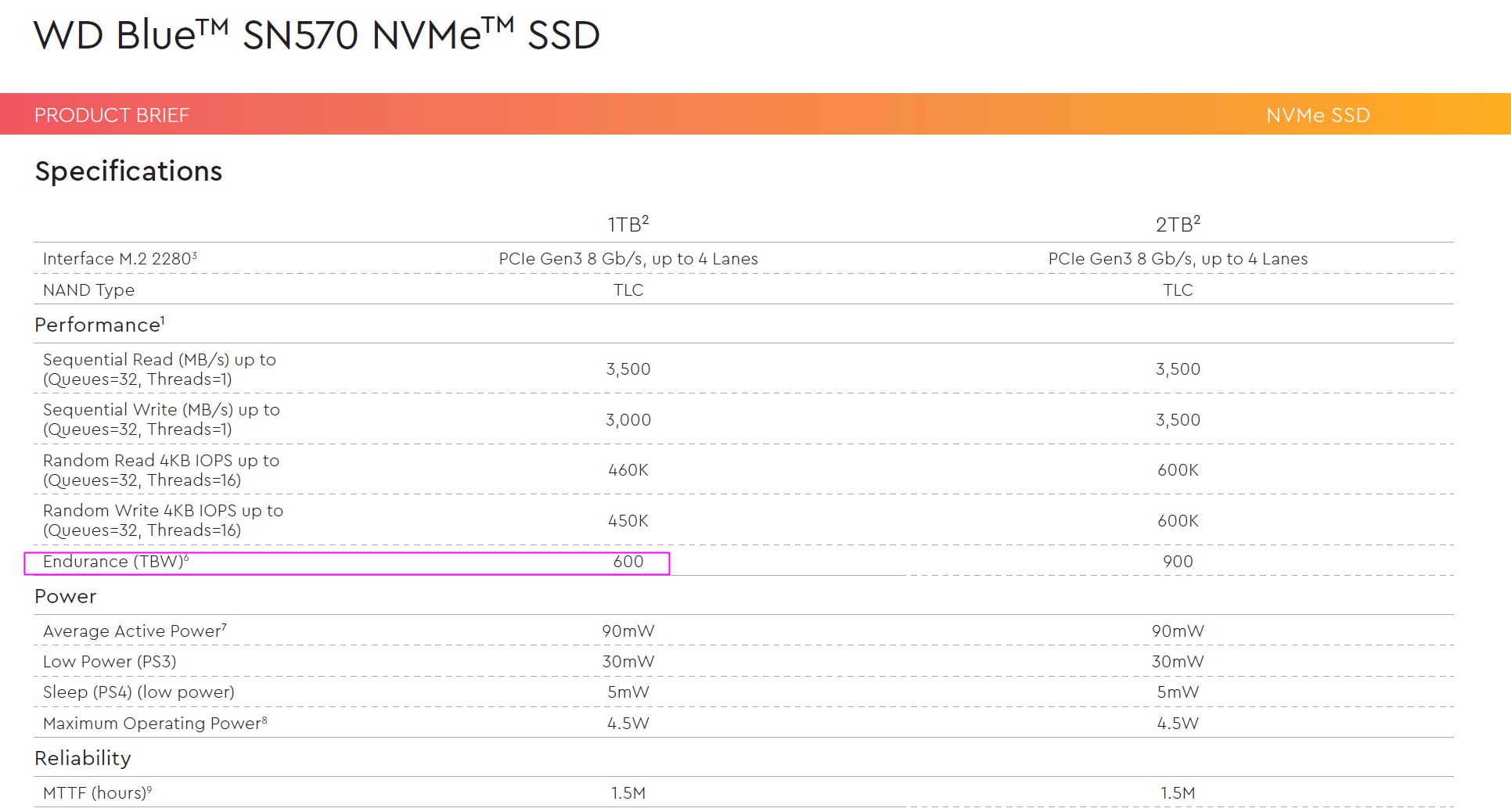
我们都知道磁盘是有寿命的,超期服役后,服务器或物联网设备的磁盘会陆续报故障损坏,意外的损坏也带来诸多问题。本文主要讲解下nvme SSD的磁盘寿命消耗情况。

2、机械底盘、线控底盘、滑板底盘与AGV、IGV、AMR
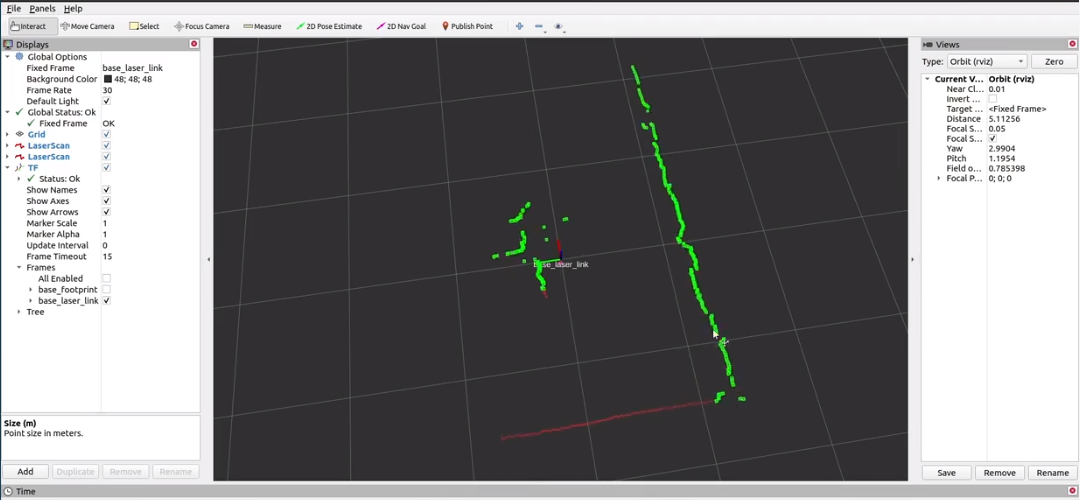
激光雷达通常可以检测360度等范围内的物体,但由于机械结构设计等原因,机器人本体可能会遮挡部分激光雷达扫描数据。如果将激光雷达原始点云直接用于建图或导航,则机器人本体的一部分会被当作障碍物导致建图或导航无法正常工作。

我们在使用SLAM建图后,为了提高显示及运行效果,通常需要对地图进行一些调整,比如点云毛刺清理、增加未知区域的边界防护等。本文主要讲解下如何对2D .gpm地图文件进行编辑修改的方法。
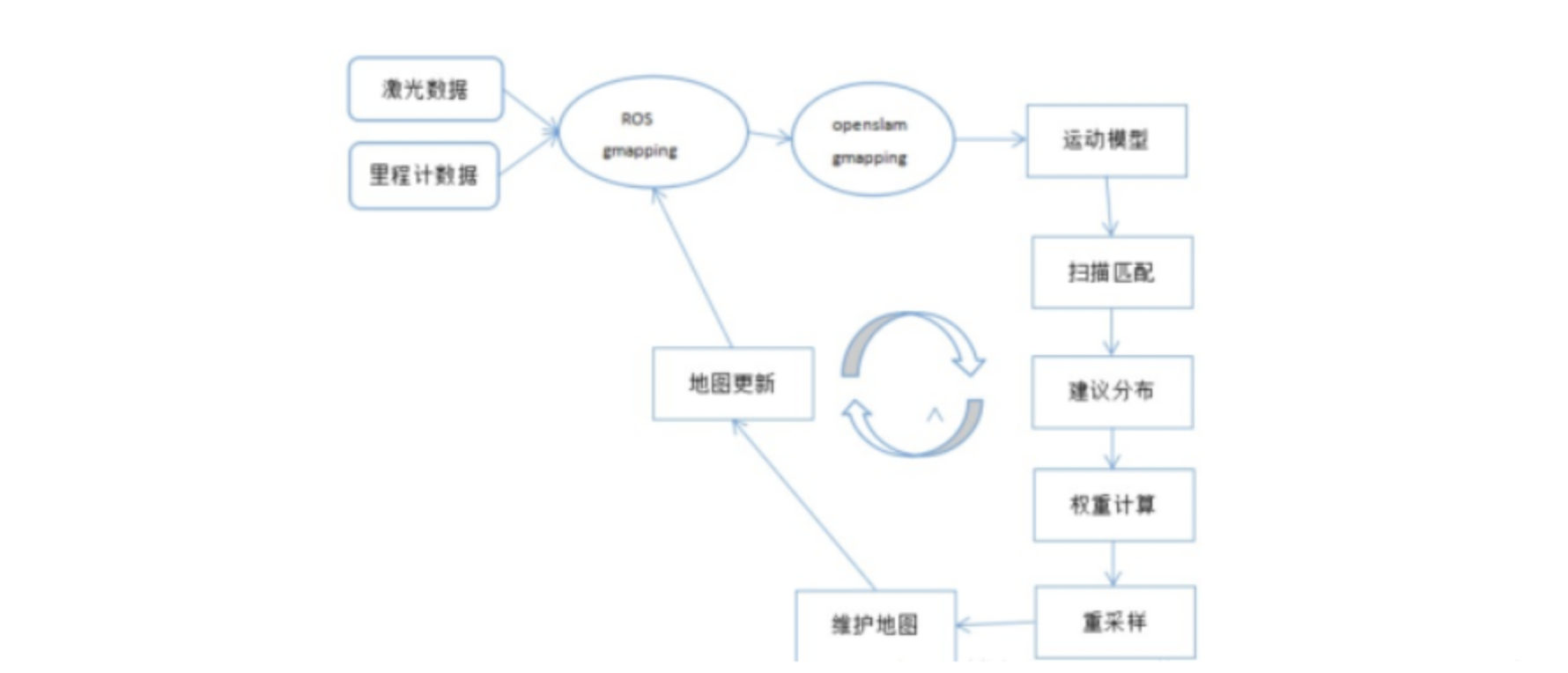
本文主要针对常见的2D建图算法Gmapping、Hector、Karto、Cartographer进行对比,以确定在室内小场景、室外大场景下使用哪种建图算法更为合适。
最近看了一本马伯庸的书《长安的荔枝》,感觉很好玩,表面上是在讲一个唐朝底层荔枝使李善德负责从广东岭南运载新鲜荔枝到长安的故事,实际讲的是一个坎坷的项目负责人如何在资源匮乏、希望渺茫的情况下推进项目达成的过程。

一个人在乘船渡河的时候,前面有一只船正要撞过来。这个人喊了好几声,但是前面的船没有回应。见状这个人十分生气,开始破口大骂前方船上的人。后来他发现撞上来的竟然是一艘空船,于是刚刚怒气冲冲的人怒火一下就消失的无影无踪了。
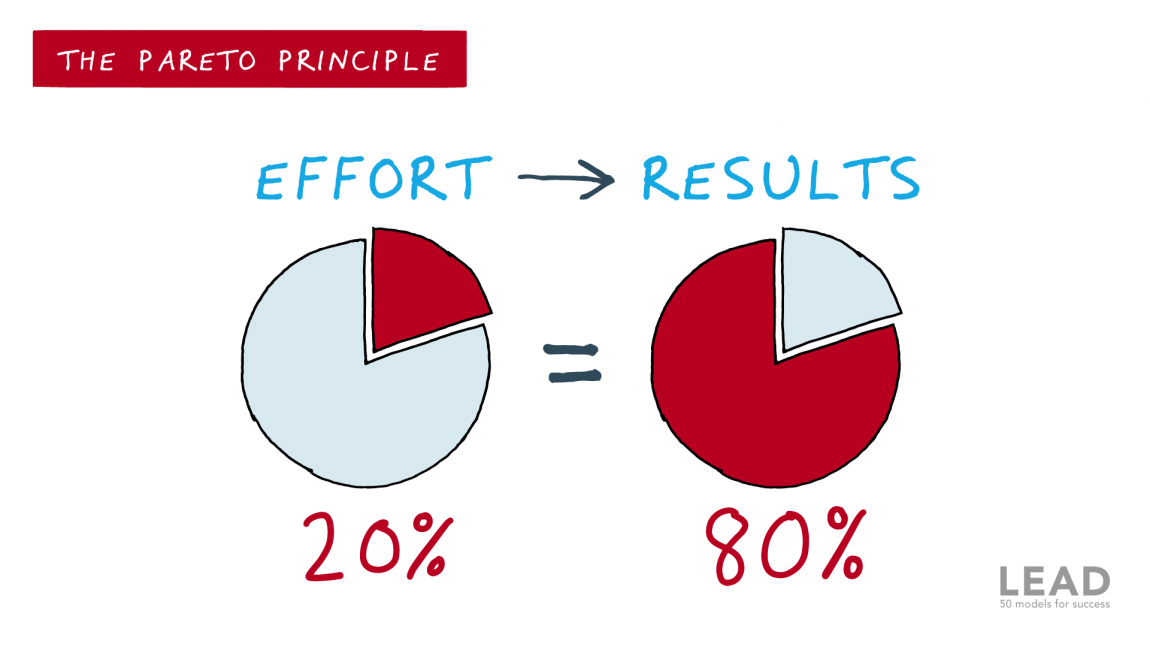
二八定律,又称帕累托法则,是由19世纪末20世纪初的意大利经济学家帕累托提出的。
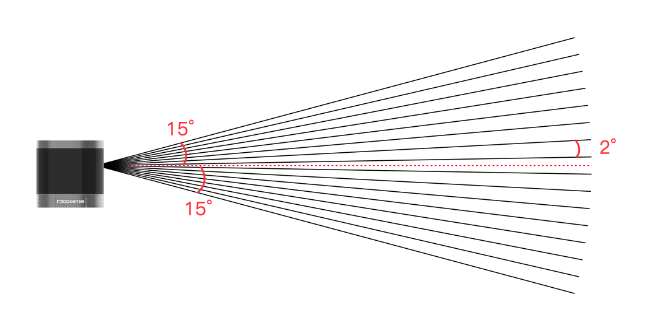
RS-LiDAR-16是速腾聚创推出的16线激光雷达,是一颗非常小型的激光雷达,主要面向无人驾驶汽车环境感知、机器人环境感知、无人机测绘等领域。RS16采用混合固态激光雷达方式,集合了16 个激光收发组件,最大探测距离150米,测量精度+/- 2cm以内。通过激光扫描反射提供三维空间点云数据及物体反射率,为定位、导航、避障等提供有力的保障。
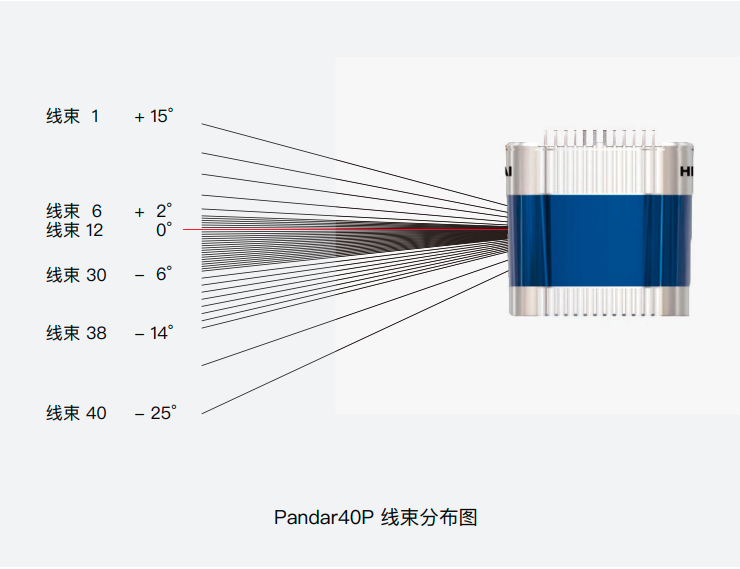
Pandar40P是一款机械旋转式40线激光雷达,其内部包含40个激光器,通过360°旋转实现3D成像。Pandar40P独特的角度分布,使其更加适用于自动驾驶。

本文主要记录华硕的GPU本(RTX2070)如何Ubuntu20.04 + Nvidia显卡驱动 + CUDA11.8 + cuDNN8.7,并验证GPU CUDA生效的过程。
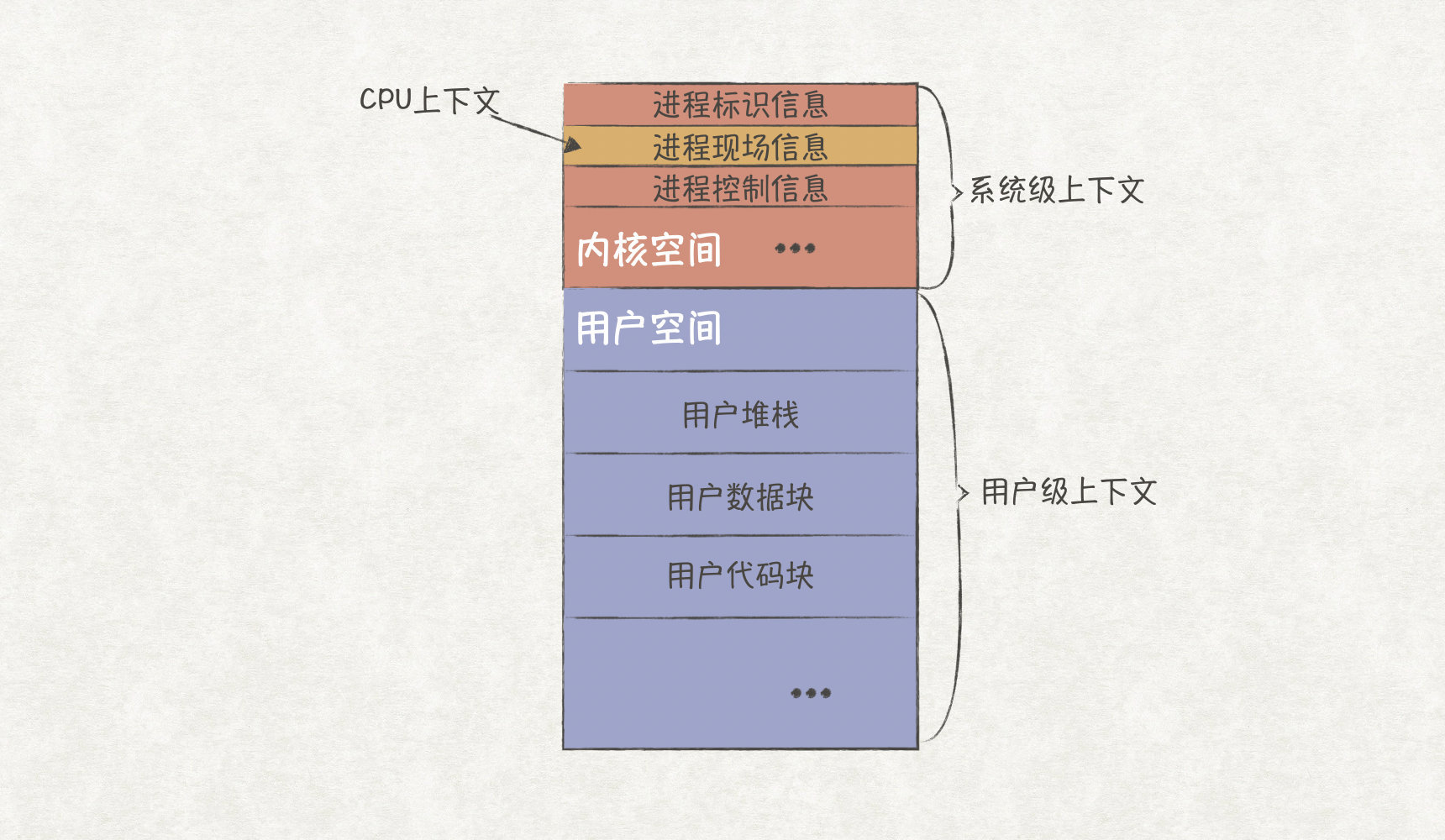
软件工程师们总习惯把OS(Operating System,操作系统)当成是一个非常值得信赖的管家,我们只管把程序托管到OS上运行,却很少深入了解操作系统的运行原理。确实,OS作为一个通用的软件系统,在大多数的场景下都表现得足够的优秀。但仍会有一些特殊的场景,需要我们对OS进行各项调优,才能让业务系统更高效地完成任务。这就要求我们必须深入了解OS的原理,不仅仅只会使唤这个管家,还能懂得如何让管家做得更好。本文主要探索其中的冰山一角:CPU的调度原理。
上一次,我们尝试了用户空间自定义函数探测,里边会用到进程ID参数,那么实际使用场景下,我们可能需要能检测到进程的拉起和退出,今天就一起来实现下这个小功能。
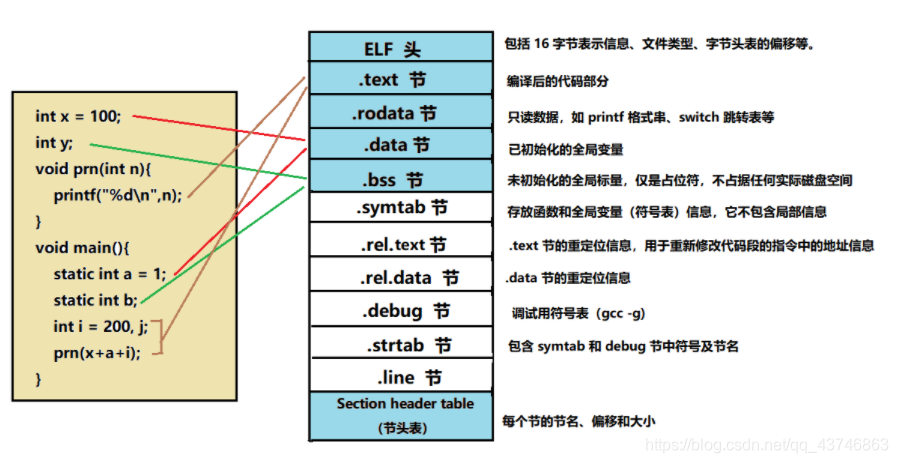
上一次,我们通过uprobe实现一个对用户空间自定义程序的特定函数出入口进行代码注入和探测的方法,但它还有很多不完善的地方,比如需要提前准备好编译后的函数符号,同时生产环境产出通常也不带符号、产出的部署位置通常也不固定,给我们在实际场景中使用带来不便。本文就讲解下如何通过导出符号表、产出去符号,通过符号表的offset、类函数名、进程PID来进行用户自定义函数调用的探测,从而更方便直接在生产环境使用。
上一次,我们通过kprobe实现一个简单的内核系统调用捕获,了解了如何在内核函数的出入口动态注入自定义代码,并通过ring buffer传递到用户空间。今天,我开始带大家通过uprobe实现一个对用户空间自定义程序的特定函数出入口进行代码注入和探测的方法。
在前两篇文章中,我们了解了eBPF的基本知识。本文开始进行一次具体的实践,带大家通过kprobe实现一个简单的内核系统调用捕获,来了解如何在内核函数的出入口动态注入自定义代码。
上一次,我们对eBPF有了基本的了解,并实现了一个简单的kprobe监听。本文我们从BPF Map开始,了解如何将在内核中抓取到的数据传递到用户空间。了解BPF Map是从0开始独立编写一个eBPF程序的必经之路。

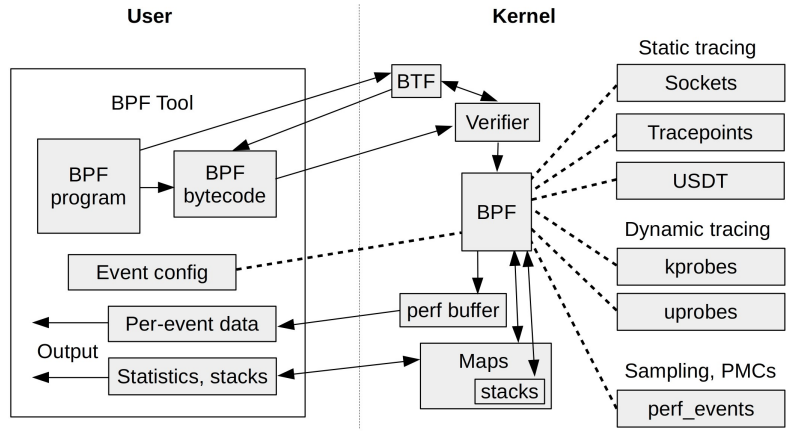
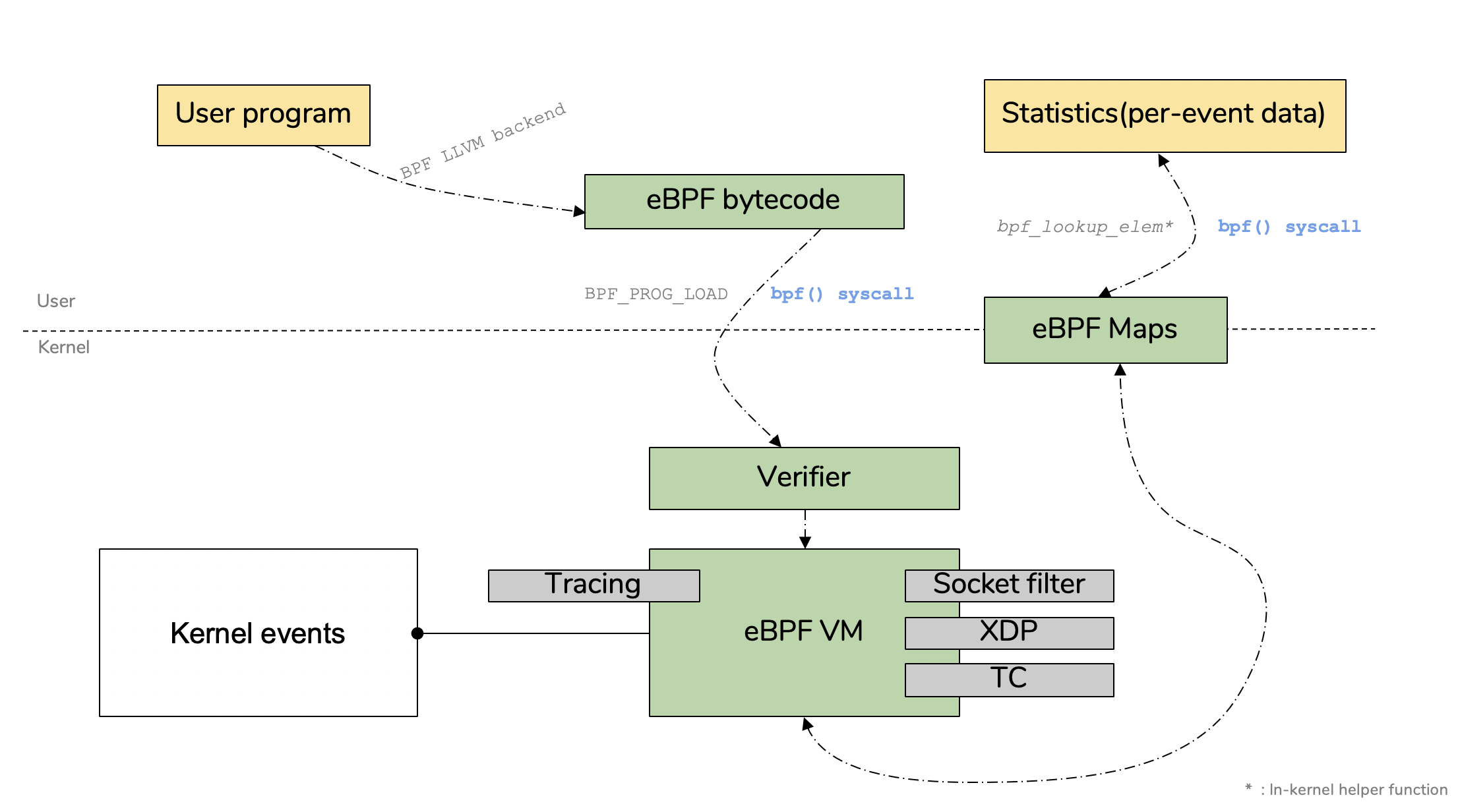
eBPF(extended Berkeley Packet Filter),即扩展的伯克利包过滤器,可谓 Linux 社区的新宠,Goole、Facebook、Twitter等公司都开始投身于 eBPF 技术的研究和应用。