本文主要针对常见的2D建图算法Gmapping、Hector、Karto、Cartographer进行对比,以确定在室内小场景、室外大场景下使用哪种建图算法更为合适。
本文主要针对常见的2D建图算法Gmapping、Hector、Karto、Cartographer进行对比,以确定在室内小场景、室外大场景下使用哪种建图算法更为合适。

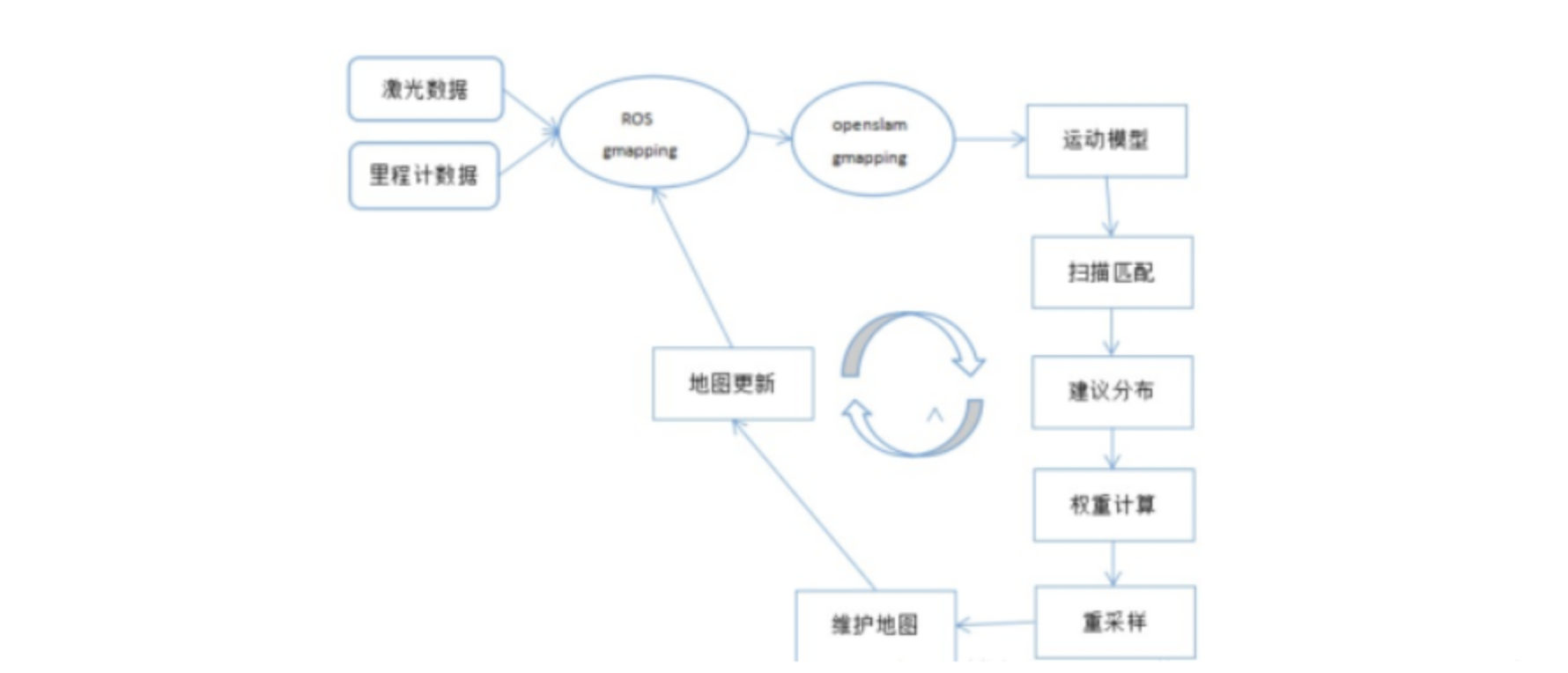
主流的激光SLAM算法有hector、gmapping、karto、cartographer。很多同学使用ROS默认自带的gmapping、hector等比较多,这次带大家一起尝试下传说中的google cartographer,看看效果差别有多大。