之前学习ros,nvidia jetson nano板子装的ubuntu18.04系统比较正常,但是pi4b的板子装的raspberry系统会出现各种依赖问题。最近想充分利用下几块Pi4B的板子,反复试了pi4安装官方/非官方的ubuntu18.04.5+ROS Melodic版本,最终都会卡在map-server或rviz等依赖上。最终用Pi4B + Ubuntu20.04.3 + ROS Noetic + RpLidar安装测试成功,记录一下安装过程。
之前学习ros,nvidia jetson nano板子装的ubuntu18.04系统比较正常,但是pi4b的板子装的raspberry系统会出现各种依赖问题。最近想充分利用下几块Pi4B的板子,反复试了pi4安装官方/非官方的ubuntu18.04.5+ROS Melodic版本,最终都会卡在map-server或rviz等依赖上。最终用Pi4B + Ubuntu20.04.3 + ROS Noetic + RpLidar安装测试成功,记录一下安装过程。
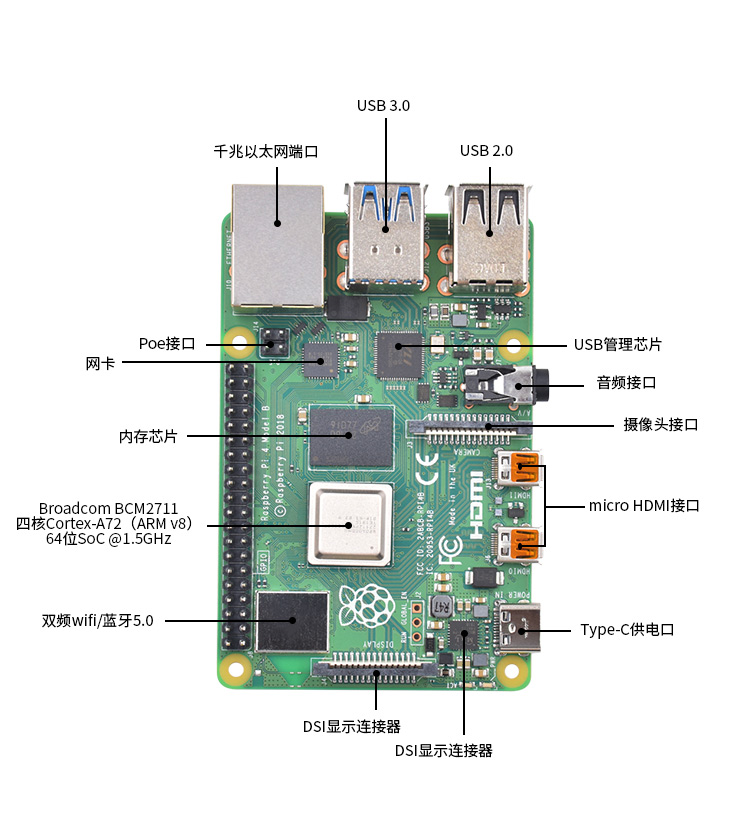
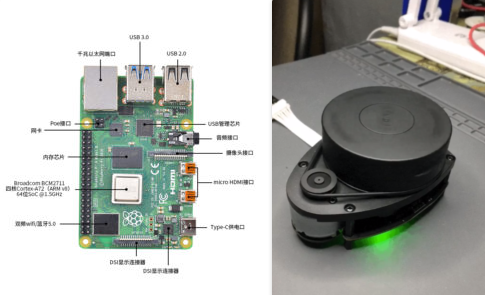
新入手一个Pi4,4核1.5GHz 64位A72处理器、8G内存(想起我的第一台电脑,赛扬处理器+512M内存…),用来做机器人的控制中心。由于树莓派4暂时还无法使用Ubuntu MATE,本文讲解给它安装Raspberry Pi OS系统 + ROS Melodic的过程。
#文中设置均基于最新版的Raspbian系统2016-11版本
新入手了pi3 model b板子,按下述操作即可安装并启动成功,mark一下,以免其它人再走弯路。