五一疫情防控不能外出,呆在家里实在无聊,决定跟儿子一起做个排爆机器人,需要同时控制4个舵机、2个底盘电机、1个无线手柄的控制和接收,但L298P只有1个伺候,再外挂个16路舵机板的话有点太乱了。偶然间看到一块功能比较全面的驱动板,可以同时驱动电机、舵机、蓝牙、超声波等,我们就使用这块板子尝试做个排爆机器人。
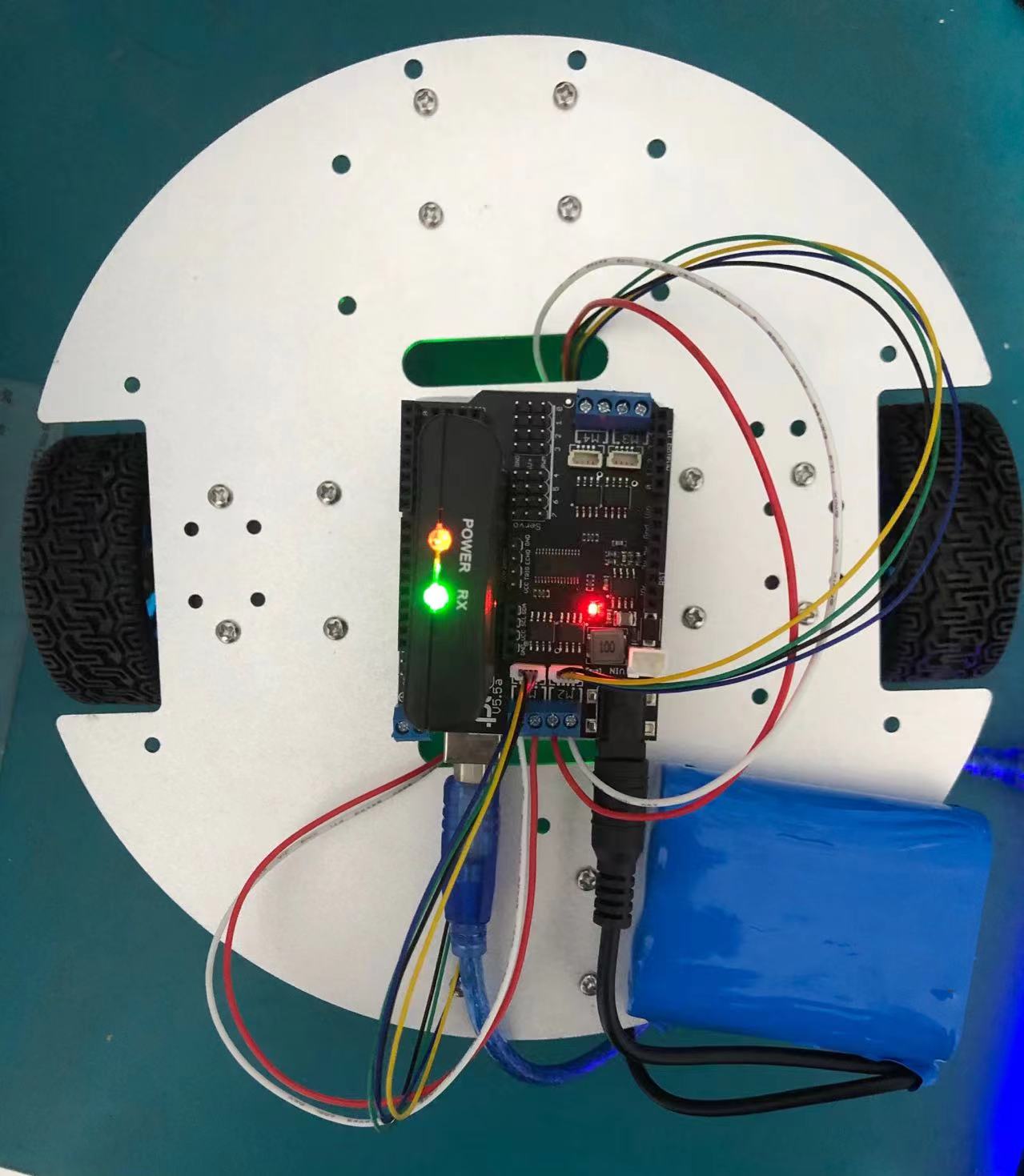
先给个效果图:
一、概述
这款驱动版是奇果派出品的Arduino MotorShiled V5.5,能同时驱动4个支流电机或2个步进电机、8路全速PWM伺候控制、PS2无线手柄、蓝牙、超声波,最大的优点是,它占用了很少的引脚,使用I2C通信的PCA9685 PWM驱动芯片控制电机速度和方向,只用2根IO引脚(SDA&SCL)就可以驱动多个电机,多个驱动板还可以级联使用,看起来相当不错。
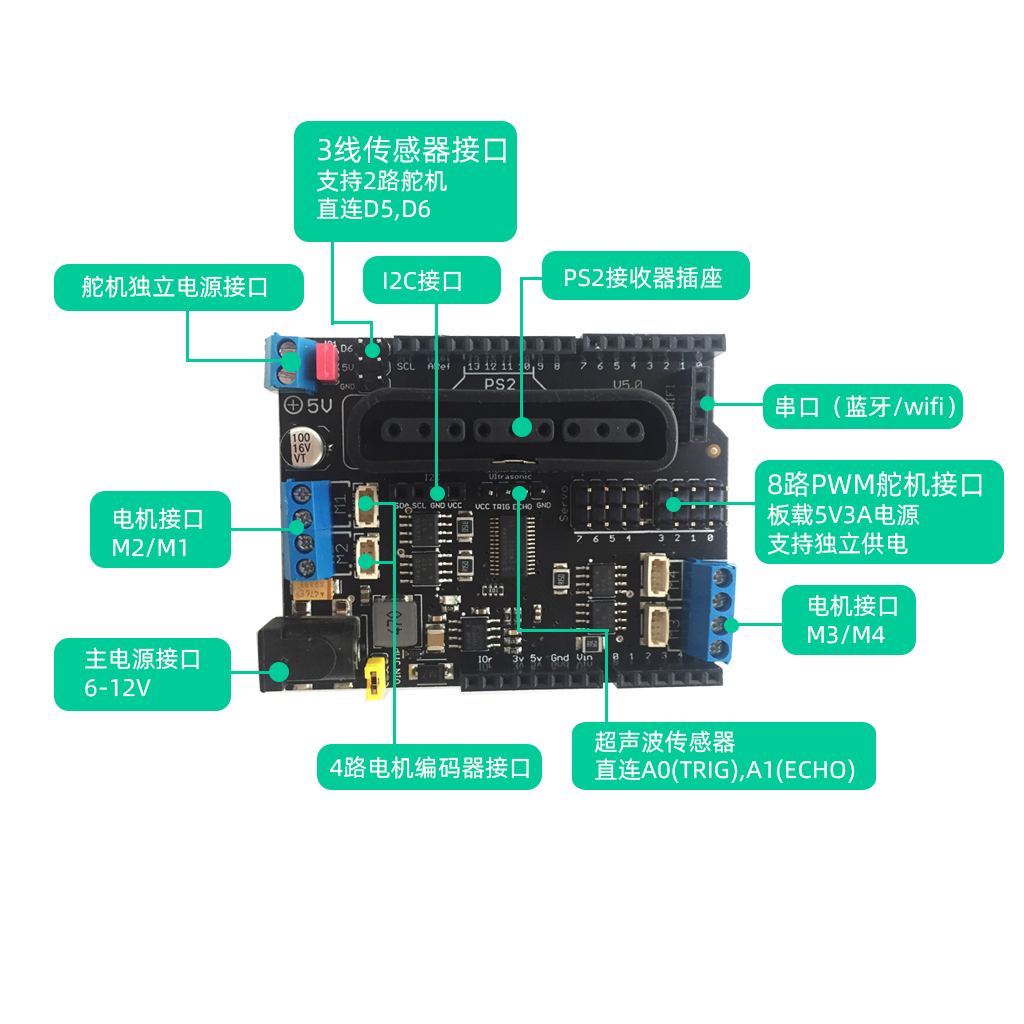
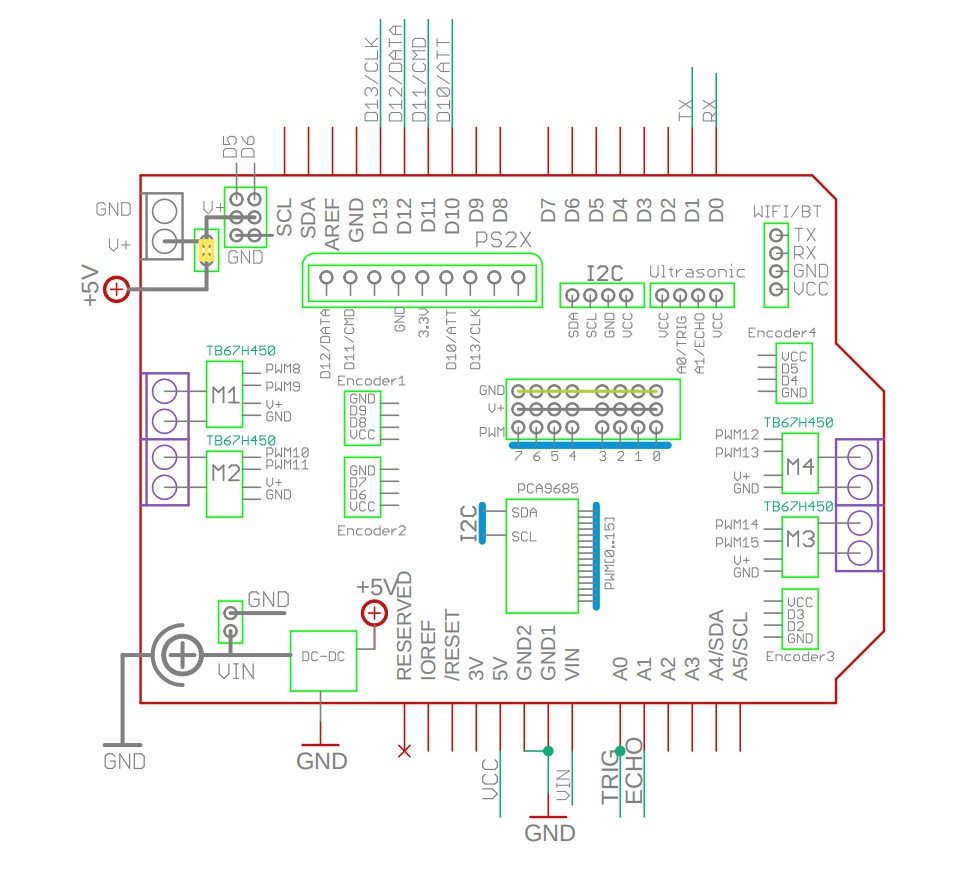
接口说明及端口占用情况:
参数说明:
- 使用东芝高性能驱动芯片,提供每路2.2A(3.6A峰值)输出,可运行4.5-13.5V直流电机;
- 可以驱动4个直流电机或2个步进电机;
- 额外提供8路PWM输出,可以控制8路舵机;
- 支持PS2无线手柄;
- 支持蓝牙模块和超声波传感器;
- 可自定义I2C地址,支持多个驱动器叠加级联;
- 提供完整的代码库和丰富示例程序,支持图形编程,简单易用。
二、供电方案
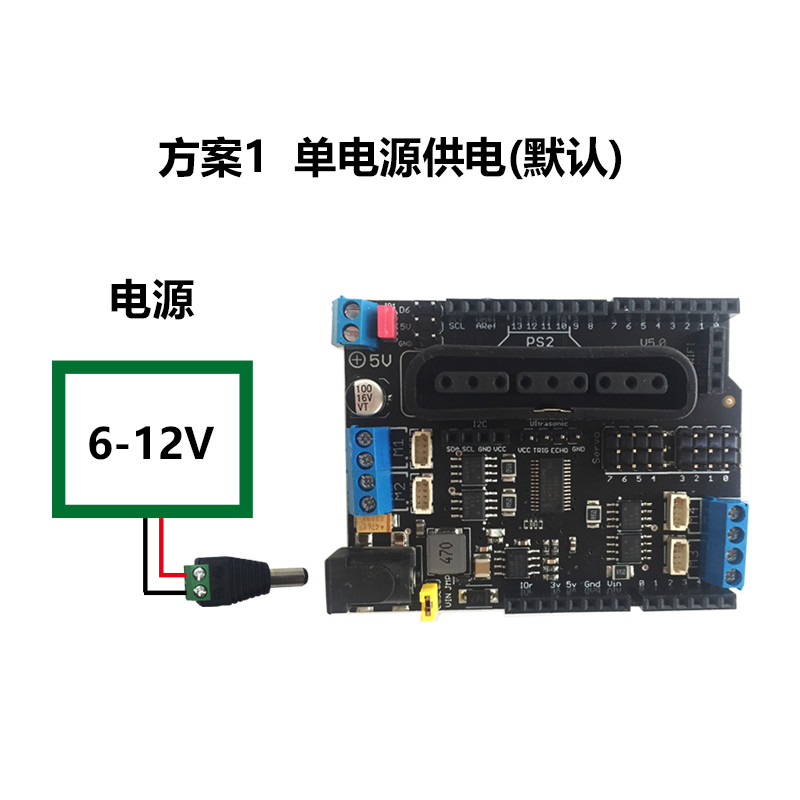
1.单电源供电
- 单电源可同时为驱动器和开发板供电
- 板载内嵌5V稳压器,可为舵机端口提供5V3A电源。
- 电源输出功率(放电电流)要够大,否则会影响稳定性
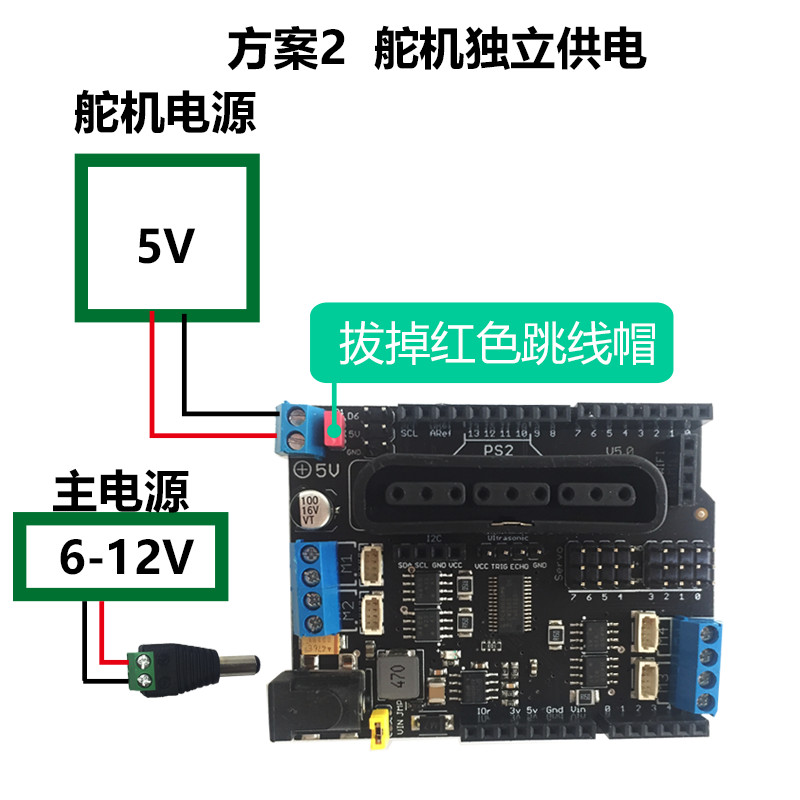
2.舵机独立供电
当需要接入多个舵机或大功率舵机的时候,请选择此方案供电
- 先拔掉左上角跳线帽,断开板载电源
- 接上跟舵机匹配电压匹配的电源,注意匹配参数,大多数舵机耐压是5-6V,电压太高会使舵机烧毁
三、功能验证
1、舵机控制(Servo)
驱动板的舵机控制通过PWM专用芯片PCA9685实现,对应的编号分别为0-7接口。驱动器内嵌稳压电路,可以输出5V,3A的电流给舵机供电。尽量避免舵机堵转或超负荷,以免影响系统稳定性或损坏舵机。
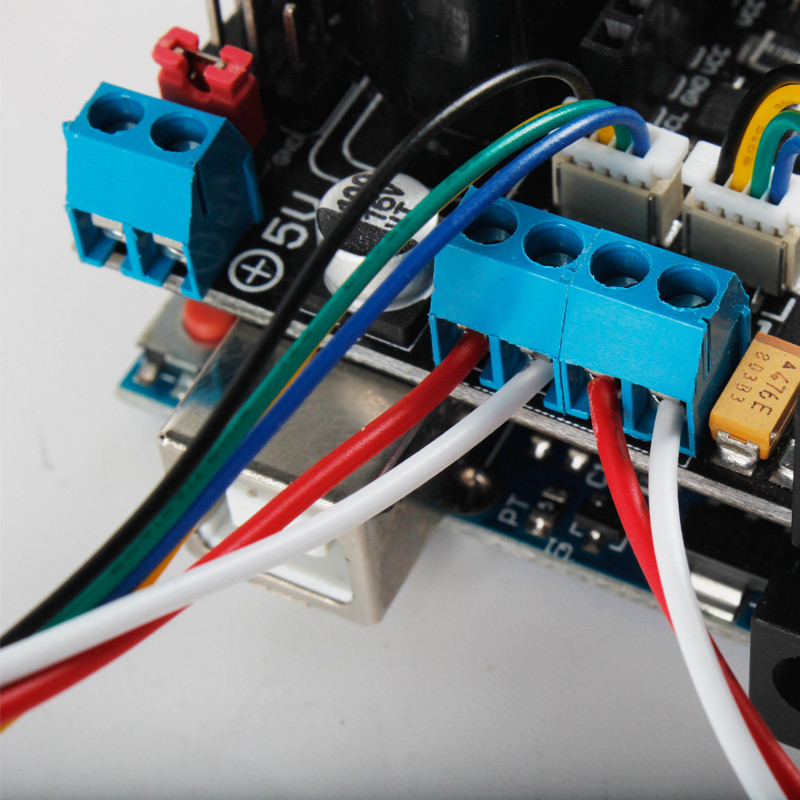
舵机接线:
注意:对于大功率的舵机(电源要求超过5V3A),请拔掉红色跳线帽,再使用跟舵机匹配的电源通过“舵机辅助电源”接口独立供电。实测来看,基本>2个MG995金属舵机就需要独立供电了。
代码示例:
#include <Wire.h>
#include "QGPMaker_MotorShield.h"
// Create the motor shield object with the default I2C address
QGPMaker_MotorShield AFMS = QGPMaker_MotorShield();
const int SERVOS = 4; //定义变量SERVOS,表示舵机数,预先赋值4
int INITANGLE[SERVOS]; //定义变量数组INITANGLE[SERVOS],用于存放当前舵机的初始角度值
// 设置舵机频率
void setServoPulse( uint8_t n, double pulse ) //n:舵机号; pulse:脉冲时间
{
double pulselength;
pulselength = 1000000; // 百万分之一秒
pulselength /= 50; //50 Hz
pulselength /= 4096; //(12位分辨率)
pulse *= 1000; //乘以1000
pulse /= pulselength; //除以pulselength变量
AFMS.setPWM( n, pulse ); //设置PWM值
}
// PWM值转化为角度
void writeServo( uint8_t n, uint8_t angle ) //n:舵机号; angle:舵机需要转到的角度
{
double pulse;
angle = (int)angle*0.922222; //根据舵机批次的不同,此批舵机实际转角与理论输入值存在0.922222的系数关系。如果舵机实际转角与理论输入值一样,则可删除此语句
pulse = 0.5 + angle / 90.0; //脉冲时间和角度值的关系公式
setServoPulse( n, pulse ); //让指定的舵机通过相对应的脉冲时间转到指定的角度
}
//初始化舵机参数
void initServos(){
INITANGLE[0] = 75; //右脚舵机原点角度
INITANGLE[1] = 75; //左脚舵机原点角度
INITANGLE[2] = 90; //右腿舵机原点角度
INITANGLE[3] = 90; //左腿舵机原点角度
}
void setup() {
Serial.begin(9600); // set up Serial library at 9600 bps
Serial.println("Servo PWM test!");
// 初始化参数
initServos();
// 启动驱动板
AFMS.begin( 50 );
// 初始化舵机角度
for ( int i = 0; i < SERVOS; i ++ ){ //For循环初始化赋值设定角度(开始将8个舵机回原点)
// 旋转到指定角度
writeServo(i, INITANGLE[i]);
}
}
void loop() {
// 抬左腿
for ( int i = 0; i < 130 - INITANGLE[0] ; i++ ){ //For循环初始化赋值设定角度(开始将8个舵机回原点)
writeServo( 0, INITANGLE[0]+i );//右脚
writeServo( 1, INITANGLE[1]+i );//左脚
delay(100);
}
//writeServo( 0, 120 );//右脚
//writeServo( 1, 120 );//左脚
delay(2000);
// 左腿前移
writeServo( 2, 70 );//右腿
writeServo( 3, 70 );//左腿
delay(2000);
// 落左腿
writeServo( 0, 75 );//右脚
writeServo( 1, 75 );//左脚
delay(2000);
// 抬右腿
//writeServo( 0, 30 );
//writeServo( 1, 30 );
for ( int i = 0; i < INITANGLE[0] - 30 ; i++ ){ //For循环初始化赋值设定角度(开始将8个舵机回原点)
writeServo( 0, INITANGLE[0]-i );//右脚
writeServo( 1, INITANGLE[1]-i );//左脚
delay(100);
}
delay(2000);
// 右腿前移
writeServo( 2, 110 );
writeServo( 3, 110 );
delay(2000);
// 落左腿
writeServo( 0, 75 );//右脚
writeServo( 1, 75 );//左脚
delay(3000);
}2、直流编码电机控制(DC Motor)
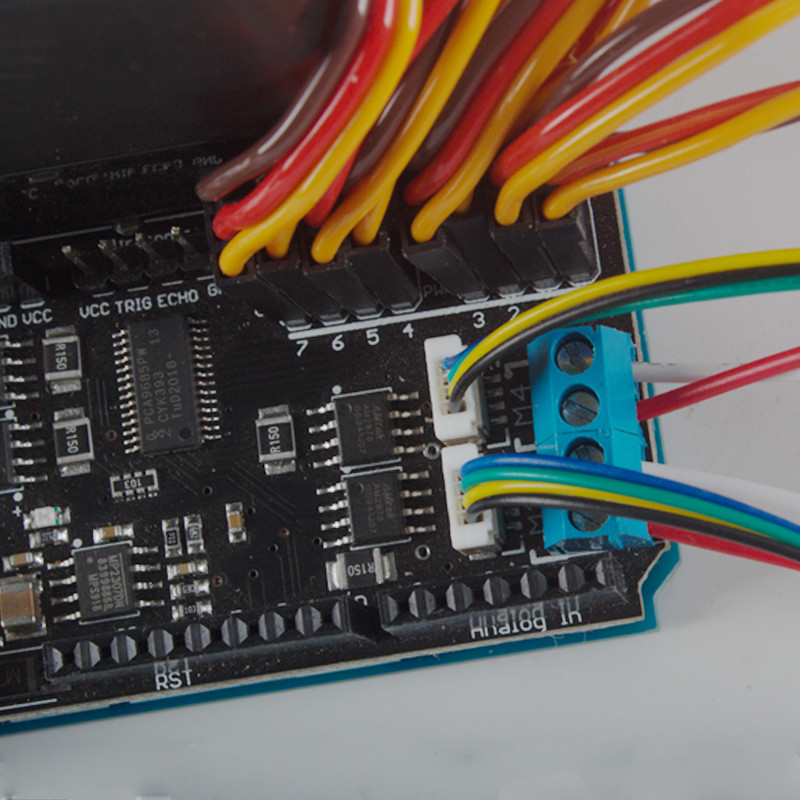
电机接线:
电机编码器接线:
代码示例:
#include <Wire.h>
#include "QGPMaker_MotorShield.h"
#include "QGPMaker_Encoder.h"
QGPMaker_MotorShield AFMS = QGPMaker_MotorShield();
QGPMaker_DCMotor *DCMotor_1 = AFMS.getMotor(1); // 1-4马达
QGPMaker_DCMotor *DCMotor_2 = AFMS.getMotor(2);
QGPMaker_Encoder Encoder1(1);
QGPMaker_Encoder Encoder2(2);
void setup(){
AFMS.begin(50); // create with the default frequency 50Hz
Serial.begin(9600);
DCMotor_1->setSpeed(50); //设置电机速度(0 stopped ~ 255 full speed)
DCMotor_1->run(FORWARD); //启动电机(FORWARD 正转, BACKWARD 反转 ,BRAKE 刹车急停 or RELEASE 关闭电机)
DCMotor_2->setSpeed(50);
DCMotor_2->run(FORWARD);
}
void loop(){
Serial.print(Encoder1.read()); //获取编码器数值
Serial.print('-');
Serial.print(Encoder2.read());
Serial.print('-');
Serial.println(Encoder1.getRPM());//获取编码器电机对应的每分钟转速(RPM)
delay(50);
}*注:如果要使用PID,接线和PID参数会有所不同,需要每个轮子单独调试转动方向和pid参数。
PID调试方法详见https://blog.yanjingang.com/?p=5604。
3、无线手柄控制(PS2)
驱动器内置PS2接收器插座,将接收器直接插入使用。

ps2控制底盘电机移动代码示例:
#include "PS2X_lib.h" //调用库文件PS2X_lib,这个是无线手柄库
#include "QGPMaker_Encoder.h"
#include "QGPMaker_MotorShield.h"
#define PS2_DAT 12 //14
#define PS2_CMD 11 //15
#define PS2_SEL 10 //16
#define PS2_CLK 13 //17
#define pressures true
#define rumble true
PS2X ps2x; // create PS2 Controller Class
//right now, the library does NOT support hot pluggable controllers, meaning
//you must always either restart your Arduino after you connect the controller,
//or call config_gamepad(pins) again after connecting the controller.
int error = 0;//连接错误
byte type = 0;//手柄形式
byte vibrate = 0;//震动
// Create the motor shield object with the default I2C address
QGPMaker_MotorShield AFMS = QGPMaker_MotorShield();
QGPMaker_DCMotor *DCMotor_1 = AFMS.getMotor(1);
QGPMaker_DCMotor *DCMotor_2 = AFMS.getMotor(2);
// 舵机角度
int currentAngle = 90;
// 马达速度
int motorSpeed = 150;
// 设置舵机频率
void setServoPulse( uint8_t n, double pulse ) //n:舵机号; pulse:脉冲时间
{
double pulselength;
pulselength = 1000000; // 百万分之一秒
pulselength /= 50; //50 Hz
pulselength /= 4096; //(12位分辨率)
pulse *= 1000; //乘以1000
pulse /= pulselength; //除以pulselength变量
AFMS.setPWM( n, pulse ); //设置PWM值
}
// PWM值转化为角度
void writeServo( uint8_t n, uint8_t angle ) //n:舵机号; angle:舵机需要转到的角度
{
double pulse;
angle = (int)angle*0.922222; //根据舵机批次的不同,此批舵机实际转角与理论输入值存在0.922222的系数关系。如果舵机实际转角与理论输入值一样,则可删除此语句
pulse = 0.5 + angle / 90.0; //脉冲时间和角度值的关系公式
setServoPulse( n, pulse ); //让指定的舵机通过相对应的脉冲时间转到指定的角度
}
void setup() {
Serial.begin(9600);
AFMS.begin(50);
Serial.println("===========beging==========");
int wait_ps2 = 500; //搜索手柄时间
do {
error = ps2x.config_gamepad(13, 11, 10, 12, true, true); // setup pins and settings: GamePad(clock, command, attention, data, Pressures, Rumble)
if (error == 0) {
Serial.println("\nConfigured successful! ");
break;
} else {
delay(100);
wait_ps2 -= 100;
}
}while(wait_ps2 > 0); //while循环直到手柄连接成功
// 舵机角度初始化
writeServo( 0, currentAngle );
}
void loop() {
ps2x.read_gamepad(false, vibrate); //read controller and set large motor to spin at 'vibrate' speed
if (ps2x.Button(PSB_START)) //will be TRUE as long as button is pressed
Serial.println("Start is being held");
if (ps2x.Button(PSB_SELECT))
Serial.println("Select is being held");
if (ps2x.Button(PSB_PAD_UP)) { //will be TRUE as long as button is pressed
Serial.print("Up held this hard: ");
Serial.println(ps2x.Analog(PSAB_PAD_UP), DEC);
DCMotor_1->setSpeed(motorSpeed);
DCMotor_2->setSpeed(motorSpeed);
DCMotor_1->run(FORWARD);
DCMotor_2->run(FORWARD);
} else if (ps2x.Button(PSB_PAD_RIGHT)) {
Serial.print("Right held this hard: ");
Serial.println(ps2x.Analog(PSAB_PAD_RIGHT), DEC);
DCMotor_1->setSpeed(motorSpeed);
DCMotor_2->setSpeed(motorSpeed);
DCMotor_1->run(BACKWARD);
DCMotor_2->run(FORWARD);
} else if (ps2x.Button(PSB_PAD_LEFT)) {
Serial.print("LEFT held this hard: ");
Serial.println(ps2x.Analog(PSAB_PAD_LEFT), DEC);
DCMotor_1->setSpeed(motorSpeed);
DCMotor_2->setSpeed(motorSpeed);
DCMotor_1->run(FORWARD);
DCMotor_2->run(BACKWARD);
} else if (ps2x.Button(PSB_PAD_DOWN)) {
Serial.print("DOWN held this hard: ");
Serial.println(ps2x.Analog(PSAB_PAD_DOWN), DEC);
DCMotor_1->setSpeed(motorSpeed);
DCMotor_2->setSpeed(motorSpeed);
DCMotor_1->run(BACKWARD);
DCMotor_2->run(BACKWARD);
} else {
DCMotor_1->setSpeed(0);
DCMotor_1->run(RELEASE);
DCMotor_2->setSpeed(0);
DCMotor_2->run(RELEASE);
}
if (ps2x.Button(PSB_CROSS)) {
Serial.println("X-X-X-X");
ps2x.read_gamepad(true, 200);
delay(300);
ps2x.read_gamepad(false, 0);
}
vibrate = ps2x.Analog(PSAB_CROSS); //this will set the large motor vibrate speed based on how hard you press the blue (X) button
if (ps2x.NewButtonState()) { //will be TRUE if any button changes state (on to off, or off to on)
if (ps2x.Button(PSB_L3))
Serial.println("L3 pressed");
if (ps2x.Button(PSB_R3))
Serial.println("R3 pressed");
if (ps2x.Button(PSB_L2))
Serial.println("L2 pressed");
if (ps2x.Button(PSB_R2))
Serial.println("R2 pressed");
if (ps2x.Button(PSB_TRIANGLE))
Serial.println("Triangle pressed");
}
if (ps2x.ButtonPressed(PSB_CIRCLE)){ //will be TRUE if button was JUST pressed
Serial.println("Circle just pressed");
// 舵机角度
for ( int i = 0; i < 10 ; i++ ){
currentAngle += i;
writeServo( 0, currentAngle );
delay(10);
}
}
if (ps2x.NewButtonState(PSB_CROSS)) //will be TRUE if button was JUST pressed OR released
Serial.println("X just changed");
if (ps2x.ButtonReleased(PSB_SQUARE)){ //will be TRUE if button was JUST released
Serial.println("Square just released");
// 舵机角度
for ( int i = 0; i < 10 ; i++ ){
currentAngle -= i;
writeServo( 0, currentAngle );
delay(10);
}
}
if (ps2x.Button(PSB_L1) || ps2x.Button(PSB_R1)) { //print stick values if either is TRUE
Serial.print("Stick Values:");
Serial.print(ps2x.Analog(PSS_LY), DEC); //Left stick, Y axis. Other options: LX, RY, RX
Serial.print(",");
Serial.print(ps2x.Analog(PSS_LX), DEC);
Serial.print(",");
Serial.print(ps2x.Analog(PSS_RY), DEC);
Serial.print(",");
Serial.println(ps2x.Analog(PSS_RX), DEC);
}
delay(50);
}注意:
- PS2手柄为非热插拔,在实际项目用,需要编写重连检测,如无法找到设备,请重启Arduino控制器。
- 手柄一段时间不操作会自动休眠,按start或analog唤醒。
4、继电器控制
将电子开关、继电器或者相关模块控制端,接到Servo舵机引脚(输入电源默认不需要接)。
代码示例:
#include <Wire.h>
#include "QGPMaker_MotorShield.h"
QGPMaker_MotorShield AFMS = QGPMaker_MotorShield();
void setup(){
AFMS.begin(50);
}
void loop(){
AFMS.setPin(2, HIGH); //2#舵机口输出高电平(电子开关打开)
//AFMS.setPWM(2, 100); //2#舵机口输出PWM值4000(可作为PWM控制,电机调速,LED亮度调节等)
delay(300);
AFMS.setPWM(2, LOW);
delay(3000);
}
四、排爆机器人
这次做的排爆机器人V1.0主要实现了机械臂控制、底盘控制、无线手柄控制,后续再增加摄像头和自动识别和控制。
实现方法其实也很简单,参考上方的驱动版使用方法即可,不在这里赘述,代码详见:https://github.com/yanjingang/robot_arm_control
运行效果:
yan 22.5.4
参考:
