最近学习ROS,涉及底盘移动等执行机构时,发现买robot套件太贵了,又懒得从pi上直接开发,翻箱倒柜找到一个以前跟儿子一起做的arduino履带坦克,就拿它作ros机器人的action执行机构吧。

本文主要讲解如何使Arduino成为一个ROS的执行节点,与Pi上的控制模块通过ROS消息通信。
一、安装Rosserial Arduino Library
已经有人也这么想并做了一个lib库叫rosserial,它是用于非ROS设备与ROS设备进行通信的一种协议。它为非ROS设备的应用程序提供了ROS节点和服务的发布/订阅功能,使在非ROS环境中运行的应用能够通过串口或网络能够轻松地与ROS应用进行数据交互。
rosserial分为客户端和服务端两部分。rosserial客户端运行在arduino/stm32等没有ROS的终端设备中,通过串口或网络与运行在ROS环境中的rosserial服务端连接,最终通过服务端节点在ROS中发布/订阅话题。
这里我们把rosserial的arduino客户端安装到开发环境里:

安装后重启arduino,即可在“示例-Rosserial Arduino Library”里看到各种示例代码。
二、Arduino pub数据给ROS
1、参考“示例-Rosserial Arduino Library-pub/sub”,编写一个arduino pub消息到ros的代码并烧制到板子上:
vim pub.ino
/*
* arduino ros pub示例
*/
#include <ros.h>
#include <std_msgs/String.h>
// ros节点句柄
ros::NodeHandle nh;
// 传输消息定义
std_msgs::String str_msg;
// 实例化发布对象 (/tank/data为话题名称,str_msg为消息内容)
ros::Publisher pub("/tank/data", &str_msg);
char hello[13] = "I'm tank!";
void setup()
{
// 初始化nh ROS节点
nh.initNode();
// nh节点使用pub发布对象来向世界中的话题发布消息
nh.advertise(pub);
}
void loop()
{
// 整理消息内容
str_msg.data = hello;
// 发布消息
pub.publish( &str_msg );
// 定频修正
nh.spinOnce();
delay(1000);
}2、Pi上测试能否收到来自arduino板子的消息:
# Pi上安装ros-melodic-rosserial服务端端
sudo apt-get install -y ros-melodic-rosserial-arduino ros-melodic-rosserial
# 启动serial_node消息中转节点
roscore
rosrun rosserial_python serial_node.py _port:=/dev/ttyACM0
# 监听arduino 发给serial_node topic的数据
rostopic echo /tank/data
# 查看节点关系图
rosrun rqt_graph rqt_graph可以看到rostopic收到了来自arduino的消息,但是节点关系图中看不到arduino,只能看到pi上用于中转消息的serial_node节点:

三、Arduino sub来自ROS的指令并控制LED灯
1、Arduino发送数据并接受来自ROS控制led是否点亮的指令:
vim sub.ino
#include <ros.h>
#include <std_msgs/String.h>
#include <std_msgs/Float64.h>
long INFRARED_PLAY = 0x00FFA857;//红外遥控器上的PLAY键指令
long INFRARED_C = 0x00FFB04F;//红外遥控器上的C指令
// led引脚
int ledPin = 13;
// ros节点句柄
ros::NodeHandle nh;
// pub数据
std_msgs::String str_msg;
char hello[]="I'm tank!";
ros::Publisher pub("/tank/data",&str_msg);
// sub指令
void Control(const std_msgs::Float64& cmd_msg)
{
if(long(cmd_msg.data) == 0 || long(cmd_msg.data) == INFRARED_C)
{
digitalWrite(ledPin, LOW);
}
if(long(cmd_msg.data) == 1 || long(cmd_msg.data) == INFRARED_PLAY)
{
digitalWrite(ledPin, HIGH);
}
}
ros::Subscriber <std_msgs::Float64> sub("/tank/cmd", &Control );
void setup()
{
pinMode(ledPin, OUTPUT);
nh.initNode();
nh.advertise(pub);// publish
nh.subscribe(sub);// subscribe
}
void loop()
{
str_msg.data = hello;
pub.publish(&str_msg);//publish a message
nh.spinOnce();
delay(1000);
}2、Pi上测试收发arduino消息:
# 启动serial_node消息中转节点
roscore
rosrun rosserial_python serial_node.py _port:=/dev/ttyACM0
[INFO] [1592984761.691208]: ROS Serial Python Node
[INFO] [1592984761.702119]: Connecting to /dev/ttyACM0 at 57600 baud
[INFO] [1592984763.806578]: Requesting topics...
[INFO] [1592984764.331100]: Note: publish buffer size is 280 bytes
[INFO] [1592984764.334090]: Setup publisher on /tank/data [std_msgs/String]
[INFO] [1592984764.343140]: Note: subscribe buffer size is 280 bytes
[INFO] [1592984764.345981]: Setup subscriber on /tank/cmd [std_msgs/UInt16]
# 监听arduino 发给serial_node topic的数据
rostopic echo /tank/data
data: "I'm tank!"
---
data: "I'm tank!"
---
# 向arduino发送控制led点亮指令
rostopic pub /tank/cmd std_msgs/Float64 1 #亮灯(pub加-1参数可只发布一次消息否则会一直发)
rostopic pub /tank/cmd std_msgs/Float64 0x00FFA857
rostopic pub /tank/cmd std_msgs/Float64 0 #灭灯
rostopic pub /tank/cmd std_msgs/Float64 0x00FFB04F四、ROS控制坦克移动
1、坦克代码增加ros指令监听
vim tank.ino
#include <IRremote.h>//包含红外库
#include <ros.h>//包含ros库
#include <std_msgs/String.h>//包含ros msg类型库
#include <std_msgs/Float64.h>
int infraredPin = 3;//红外线接收器端口
long INFRARED_PLAY = 0x00FFA857;//红外遥控器上的PLAY键指令
long INFRARED_LEFT = 0x00FFE01F;//红外遥控器上的左键指令
long INFRARED_RIGHT = 0x00FF906F;//红外遥控器上的右键指令
long INFRARED_UP = 0x00FF02FD;//红外遥控器上的上键指令
long INFRARED_DOWN = 0x00FF9867;//红外遥控器上的下键指令
long INFRARED_C = 0x00FFB04F;//红外遥控器上的C指令
long INFRARED_TEST = 0x00FF22DD;//红外遥控器上的TEST键指令
long INFRARED_RETURN = 0x00FFC23D;//红外遥控器上的RETURN键指令
int ledLightPin = 4; //led常亮端口
int ledPin = 13; //led控制提醒端口
int rightMotor = 5; // 定义uno的pin 5 向 rightMotor 输出
int rightMotor_ = 6; // 定义uno的pin 6 向 rightMotor_ 输出
int leftMotor = 9; // 定义uno的pin 9 向 leftMotor 输出
int leftMotor_ = 10; // 定义uno的pin 10 向 leftMotor_ 输出
IRrecv irrecv(infraredPin);//初始化红外接收器对象
decode_results results;//定义results变量为红外结果存放位置
ros::NodeHandle nh; // ros节点句柄
/* pub ros数据 */
std_msgs::String str_msg;
char hello[]="I'm tank!";
ros::Publisher pub("/tank/data",&str_msg);
/* sub ros指令 */
void control(const std_msgs::Float64& cmd_msg){
execute(long(cmd_msg.data)); //执行指令
}
ros::Subscriber <std_msgs::Float64> sub("/tank/cmd", &control );
/* 指令执行 */
bool cmd_keep = true;//是否保持末次指令一直执行
void execute(long cmd){
if (cmd == INFRARED_TEST) {//遥控器按下了TEST键,不保持末次指令
cmd_keep = false;
}else if (cmd == INFRARED_RETURN) {//遥控器按下了返回键,保持末次指令一直执行
cmd_keep = true;
}else if (cmd == INFRARED_PLAY || cmd == INFRARED_UP) {//遥控器按下了PLAY/UP键,前进
digitalWrite(ledPin, HIGH);
//forward 向前转
digitalWrite(rightMotor,HIGH); //给高电平
digitalWrite(rightMotor_,LOW); //给低电平
digitalWrite(leftMotor,HIGH); //给高电平
digitalWrite(leftMotor_,LOW); //给低电平
}else if (cmd == INFRARED_DOWN ) {//遥控器按下了-键,后退
digitalWrite(ledPin, HIGH);
//back 向后转
digitalWrite(rightMotor,LOW);
digitalWrite(rightMotor_,HIGH);
digitalWrite(leftMotor,LOW);
digitalWrite(leftMotor_,HIGH);
}else if (cmd == INFRARED_LEFT ) {//遥控器按下了左键,左转
digitalWrite(ledPin, HIGH);
//left 左转
digitalWrite(leftMotor,LOW);
digitalWrite(leftMotor_,LOW);
digitalWrite(rightMotor,HIGH);
digitalWrite(rightMotor_,LOW);
}else if (cmd == INFRARED_RIGHT ) {//遥控器按下了右键,右转
digitalWrite(ledPin, HIGH);
//right 右转
digitalWrite(rightMotor,LOW);
digitalWrite(rightMotor_,LOW);
digitalWrite(leftMotor,HIGH);
digitalWrite(leftMotor_,LOW);
}else if (cmd == INFRARED_C || cmd_keep == false) {//遥控器按下了C键或非持续类指令,停止
digitalWrite(ledPin, LOW);
//stop 停止
digitalWrite(rightMotor,LOW);
digitalWrite(rightMotor_,LOW);
digitalWrite(leftMotor,LOW);
digitalWrite(leftMotor_,LOW);
}
}
/* 履带坦克 */
void setup() {
//红外接收器端口初始化
pinMode(infraredPin, INPUT);
//初始化电机IO,模式为OUTPUT 输出模式
pinMode(rightMotor,OUTPUT);
pinMode(rightMotor_,OUTPUT);
pinMode(leftMotor,OUTPUT);
pinMode(leftMotor_,OUTPUT);
//led端口初始化
pinMode(ledPin, OUTPUT);
pinMode(ledLightPin, OUTPUT);
digitalWrite(ledLightPin, HIGH);
//波特率57600
//Serial.begin(57600);
//启动红外解码
irrecv.enableIRIn();
//ROS节点初始化
nh.initNode();
nh.advertise(pub);// publish
nh.subscribe(sub);// subscribe
}
void loop() {
//检测红外信号
if (irrecv.decode(&results)) {//是否接收到解码数据,把接收到的数据存储在变量results中
//Serial.println(results.value, HEX);//接收到的数据以16进制的方式在串口输出
//执行指令
execute(results.value);
//继续等待接收下一组信号
irrecv.resume();
//led熄灭
delay(200);
digitalWrite(ledPin, LOW);
}
/*
//pub ros消息
str_msg.data = hello;
pub.publish(&str_msg);//publish a message
delay(10);
*/
nh.spinOnce();
}
2、Pi上测试控制坦克:
# 查看arduino板子波特率
stty -F /dev/ttyACM0 57600 #设置为57600(代码里不要修改Serial波特率)
# 启动serial_node消息中转节点
roscore
rosrun rosserial_python serial_node.py _port:=/dev/ttyACM0
# 向arduino发送控制坦克控制指令
rostopic pub /tank/cmd std_msgs/Float64 0x00FF22DD #切换为单次执行
#rostopic pub /tank/cmd std_msgs/Float64 0x00FFC23D #恢复为持续执行
rostopic pub /tank/cmd std_msgs/Float64 0x00FF02FD #前进 或 0x00FFA857
#rostopic pub /tank/cmd std_msgs/Float64 0x00FF9867 #后退
#rostopic pub /tank/cmd std_msgs/Float64 0x00FFE01F #左转
#rostopic pub /tank/cmd std_msgs/Float64 0x00FF906F #右转
rostopic pub /tank/cmd std_msgs/Float64 0x00FFB04F #停止
*或写ros代码pub相关指令,因与rosserial无关不再赘述
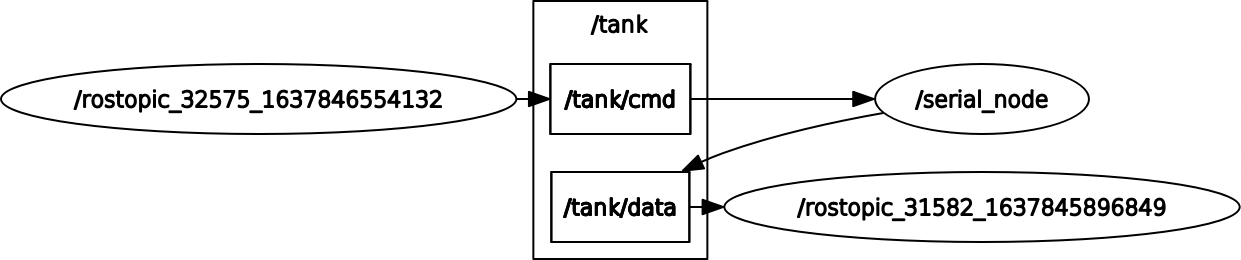
# 查看节点关系
rqt_graph
rostopic指令节点发出cmd消息,rosserial server node将消息转发给ttyACM0的底盘rosserial客户端节点(转发部分在graph上看不到)
测试控制效果:

今天就先到这里,下一篇我们会把RGB-D深度相机的3维点云部分测试好后加到这个坦克上做为它的眼睛来感知环境。
yan 20.6.25 3:18
参考:
ROS学习之Arduino篇—rosserial_arduino包
ROS与Arduino学习(八)电机控制(基于rosserial_arduino)
