最近调研4G图传控制模组,发现一个不错的wifi图传模块,用起来很简单,但是只能基于模组自身的wifi信号传输而不能走4G。虽然没能满足4G的需求,但是依然可以在很多场景发挥作用,比如近场遥控汽艇、潜艇、无人机、坦克的视频监控,Wifi 2.4G的信号也还是可以传很远距离的,既然还有这么多应用场景,这里就记录下模组的设计和使用方法吧,方便做小玩意时用。
一、概述

1.模组说明
1.1.图传
- 模组内置单片机+wifi模块,供电后自动启动wifi热点,使用WLUFO APP连接热点后,自动实现图传显示能力
- 图传和控制都在SWLTOY-WIFI视频模组+APP里,arduino仅用于通过模组接收来自APP的控制信号;图传能力与arduino无关,可单独v3.3供电使用
1.2.控制
- 模组信号线连接到arduino RX端口后,arduino可通过19200串口与模组通信,获取来自WLUFO APP的操作控制信号,之后在arduino端实现后续舵机或电机控制即可
- 串口发送数据格式(串口波特率 19200,1 个启始位,1 个停止位,其它无),发送间隔 40MS,一次发送 8 个 BYTE,数据格式(定高状态):66 80 80 80 80 40 40 99:
- BYTE[0]:数据头,固定为 0X66。速度为 30%时,(副翼,升降舵)0x59-0x80-0xA8 线性变化。速度为 60%时,(副翼,升降舵)0x45-0x80-0xBC 线性变化。速度为 100%时,(副翼,升降舵)0x00-0x80-0xFF 线性变化。
- BYTE[1]:AIL——副翼(4-5): 中间值 0x80,左边最大为 0x00,右边最大为 0xff。
- BYTE[2]:ELE——升降舵(6-7):中间值 0x80,后最大为 0x00,前最大为 0xff。
- BYTE[3]:THR——油门(1):0x00 为最小,0xff 为最大。油门在没有开启定高模式的时候,就是 0,开启定调模式后是居中(0x80)。(微调说明:前后/侧飞:±24 步 步进 1 128+偏移量,每次重启后回归默认值 128)。
- BYTE[4]:RUDD——方向舵(2-3):中间值 0x80,左转最大为 0x00,右转最大为 0xff。
- BYTE[5]:标志位。bit0=一键起飞 先置 1,1 秒后置 0 默认为 0,0x41。bit1=一键下降 先置 1,1 秒后置 0 默认为 0,0x42。
- BYTE[6]:校验位。(BYTE[1]^BYTE[2]^BYTE[3]^BYTE[4]^BYTE[5])&0xff。
- BYTE[7]:数据尾,固定为 0x99。
2.优点
- 摄像头图传模组独立封装,与arduino分离,只关心控制信号部分实现即可
3.不足
- 模组配套的APP没有源码,如果要二次开发,需要反编译APK研究后再自己实现
二、连线

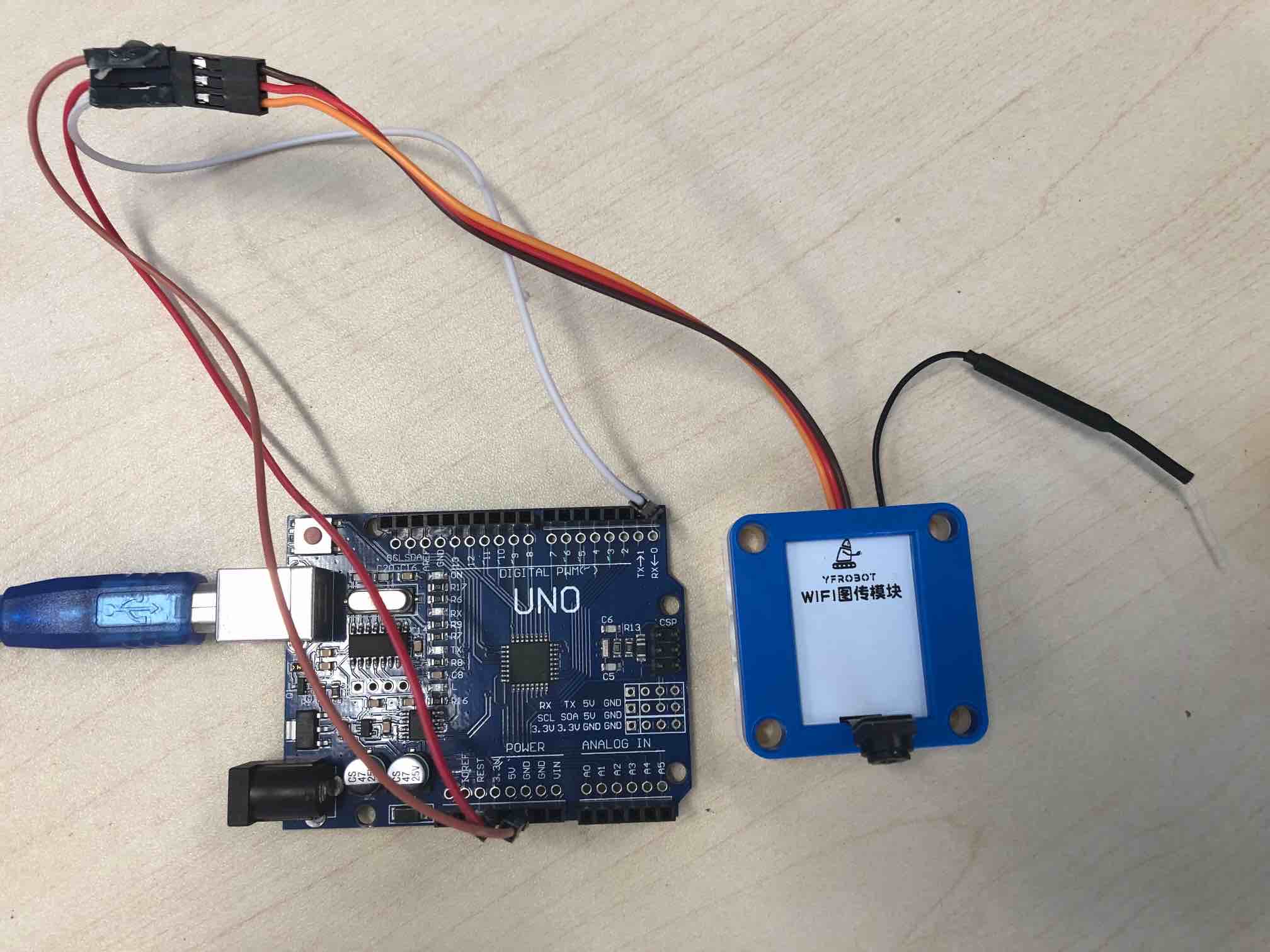
硬件连线:
Arduino——-模组
3.3V ——– VCC
GND ——– GND
RX ——– TX
实际连线图:
注:坦克底盘采用的l298n+2个小马达,具体接线方法不在赘述,大家翻一翻我之前发的l298n电驱版的教程即可。
三、调试
1.图传测试
1.1.安装APP

1.3.测试图传
模块自带 WiFi 信号,将模块通电并连接 WiFi 信号即可实时传输视频。模块上电后蓝灯常亮, 手机连接WIFI名称 WIFIUFO-XXXX,无 WiFi 信号时重新将模块上电即可。
WIFI连接成功后打开WL-UFO APP,点击右下角PLAY按钮,打开界面后即可查看实时传输回来的图像。模块通电情况下为蓝灯常亮模式(可从侧面查看),当打开软件时灯闪烁,此时即可控制,如需连接信号读取处理可打开OFF按键,出现控制状态界面即可控制输出信号,单片机获取信号后处理即可控制需要的模块,如电机,舵机,灯。

2.控制信号接收测试
调试程序:
/*
Wifi 视频传输 控制舵机转向小车
硬件连线:
Arduino Pin Wifi视频传输模块
3.3v -------- VCC
GND -------- GND
RX -------- TX
原理说明:图传和控制都在SWLTOY-WIFI视频模组+APP里,arduino仅用于通过模组接收来自APP的控制信号
-Wifi摄像头模组内置有单片机,供电线供电后即启动wifi,并提供与WLUFO APP图传和控制信号交互能力。和部分能力与arduino无关,离开arduino单独v3.3供电即可使用
-信号线连接到arduino RX端口后,arduino可通过19200串口与Wifi摄像头模组通信,获取WLUFO APP里操作的控制信号,并进行后续舵机或电机操作即可
*/
#include <Servo.h>
#define DATA_LENGHT 5
static uint8_t AIL = 0;
static uint8_t ELE = 1;
static uint8_t THR = 2;
static uint8_t RUDD = 3;
static uint8_t FLAG = 4;
static uint8_t Data[5] = {0, 0, 0, 0, 0};
static uint32_t checksum;
void setup() { //程序初始化,只运行一次
Serial.begin(19200);
Serial.println("Begin...");
delay(100);
}
void loop() { //主程序运行
serialCom();
}
void serialCom() { //数据通讯
uint8_t c, checks;
static uint8_t offset;
static enum _serial_state {
IDLE,
HEADER_66,
HEADER_99,
}
c_state;
while (Serial.available()) {
c = Serial.read(); // 读串口缓冲区
if (c_state == IDLE) { // 串口状态空闲,等待HEADER_66状态的到来
c_state = (c == 0x66) ? HEADER_66 : IDLE; // 判断是否进入HEADER_66
offset = 0;
checksum = 0;
for (int i = 0 ; i < 5; i++)
Data[i] = 0;
} else if (c_state == HEADER_66 && offset < DATA_LENGHT) { // 进入 HEADER_66 状态,读取数据
Data[offset] = c;
checksum ^= c; // 校验和
offset++;
} else if (c_state == HEADER_66 && offset >= DATA_LENGHT) { // 数据结束,读取校验和
checks = c;
c_state = HEADER_99;
} else if (c_state == HEADER_99) {
if ((checksum & 0xFF) == checks && c == 0x99) // 判断校验和
evaluateCommand(); // 数据处理程序
c_state = IDLE; // 返回IDLE状态
}
}
}
/*****************************************************************
数据处理程序,将获取到的数据做处理,执行相对应的指令
******************************************************************/
void evaluateCommand() {
Serial.print("evaluateCommand :");
Serial.print(Data[ELE]);
Serial.print(" ");
Serial.print(Data[AIL]);
Serial.print(" ");
Serial.print(Data[THR]);
Serial.print(" ");
Serial.print(Data[RUDD]);
Serial.print(" ");
Serial.print(Data[FLAG]);
Serial.println("");
// Control Servo or DC Motor
}注意:
- 烧制程序时必须拔掉RX线,否则会因为0、1串口被占用导致avrdude: stk500_getsync() attempt 1 of 10: not in sync: resp=0x00错误,拔掉RX线重新烧制,烧制完毕再插上就行了。
- 烧制完毕后如果图传不能正常显示,可以给板子重新上下电,并检查连的WIFI是否正确。
3.小车控制测试
代码:
/*
wifi图传模块+arduino+l298n制作的wifi视频小车
硬件连线:
Arduino Pin Wifi视频传输模块
3.3v -------- VCC
GND -------- GND
RX -------- TX
原理说明:图传和控制都在SWLTOY-WIFI视频模组+APP里,arduino仅用于通过模组接收来自APP的控制信号
-Wifi摄像头模组内置有单片机,供电线供电后即启动wifi,并提供与WLUFO APP图传和控制信号交互能力。和部分能力与arduino无关,离开arduino单独v3.3供电即可使用
-信号线连接到arduino RX端口后,arduino可通过19200串口与Wifi摄像头模组通信,获取WLUFO APP里操作的控制信号,并进行后续舵机或电机操作即可
*/
// 图传模块串口数据
#define DATA_LENGHT 5
static uint8_t Data[5] = {0, 0, 0, 0, 0};
static uint8_t DIR = 0; //左转128-88,右转128-168
static uint8_t RUN = 1; //前进128-168,后退128-88
static uint8_t THR = 2; //油门0-255
static uint8_t RUDD = 3; //方向0-128-255
static uint8_t FLAG = 4;
static uint32_t checksum;
// 马达引脚
int DC_LEFT1 = 5; // 定义uno的pin 5 向 DC_LEFT1 输出
int DC_LEFT2 = 6; // 定义uno的pin 6 向 DC_LEFT2 输出
int DC_RIGHT1 = 9; // 定义uno的pin 9 向 DC_RIGHT1 输出
int DC_RIGHT2 = 10; // 定义uno的pin 10 向 DC_RIGHT2 输出
int DC_SPEED_LEFT = 180; //速度
int DC_SPEED_RIGHT = 170; //速度
//程序初始化
void setup() {
// 启动图传串口通信并发送指令
Serial.begin(19200);
Serial.println("Begin...");
// 初始化马达引脚为
pinMode(DC_LEFT1, OUTPUT);
pinMode(DC_LEFT2, OUTPUT);
pinMode(DC_RIGHT1, OUTPUT);
pinMode(DC_RIGHT2, OUTPUT);
delay(100);
}
//主程序运行
void loop() {
// 读取串口指令数据
readSerialCom();
}
//读取串口数据
void readSerialCom() {
uint8_t c, checks;
static uint8_t offset;
static enum _serial_state {
IDLE,
HEADER_66,
HEADER_99,
}
c_state;
while (Serial.available()) {
c = Serial.read(); // 读串口缓冲区
if (c_state == IDLE) { // 串口状态空闲,等待HEADER_66状态的到来
c_state = (c == 0x66) ? HEADER_66 : IDLE; // 判断是否进入HEADER_66
offset = 0;
checksum = 0;
for (int i = 0 ; i < 5; i++)
Data[i] = 0;
} else if (c_state == HEADER_66 && offset < DATA_LENGHT) { // 进入 HEADER_66 状态,读取数据
Data[offset] = c;
checksum ^= c; // 校验和
offset++;
} else if (c_state == HEADER_66 && offset >= DATA_LENGHT) { // 数据结束,读取校验和
checks = c;
c_state = HEADER_99;
} else if (c_state == HEADER_99) {
if ((checksum & 0xFF) == checks && c == 0x99){ // 判断校验和
// 执行串口发来的指令
execSerialCommand();
}
c_state = IDLE; // 返回IDLE状态
}
}
}
// 执行串口发来的指令
void execSerialCommand() {
/*Serial.print("execSerialCommand :");
Serial.print(Data[DIR]);
Serial.print(" ");
Serial.print(Data[RUN]);
Serial.print(" ");
Serial.print(Data[THR]);
Serial.print(" ");
Serial.print(Data[RUDD]);
Serial.print(" ");
Serial.print(Data[FLAG]);
Serial.println("");*/
//指令处理
// RUN 前进138-168,后退118-88
// DIR 左转118-88,右转138-168
if (Data[RUN] > 0 && Data[DIR] > 0) {
if (Data[RUN] >= 138 && Data[RUN] <= 168 && Data[DIR] >= 138 && Data[DIR] <= 168) { //前+右
//Serial.println("UP RIGHT");
//forward + right 向前右转
analogWrite(DC_LEFT1, DC_SPEED_LEFT); //pwm调速
digitalWrite(DC_LEFT2, LOW);
analogWrite(DC_RIGHT1, DC_SPEED_RIGHT * (168 - Data[DIR])/(168-128)); //pwm调速
digitalWrite(DC_RIGHT2, LOW);
}
else if (Data[RUN] >= 138 && Data[RUN] <= 168 && Data[DIR] >= 88 && Data[DIR] <= 118) { //前+左
//Serial.println("UP LEFT");
//forward + left 向前左转
analogWrite(DC_LEFT1, DC_SPEED_LEFT * (Data[DIR] - 88)/(128-88)); //pwm调速
digitalWrite(DC_LEFT2, LOW);
analogWrite(DC_RIGHT1, DC_SPEED_RIGHT); //pwm调速
digitalWrite(DC_RIGHT2, LOW);
}
else if (Data[RUN] >= 88 && Data[RUN] <= 118 && Data[DIR] >= 88 && Data[DIR] <= 118) { //后+左
//Serial.println("DOWN LEFT");
//back + left 向左后转
digitalWrite(DC_LEFT1, LOW);
analogWrite(DC_LEFT2, DC_SPEED_LEFT);
digitalWrite(DC_RIGHT1, LOW);
analogWrite(DC_RIGHT2, DC_SPEED_RIGHT * (Data[DIR] - 88)/(128-88));
}
else if (Data[RUN] >= 88 && Data[RUN] <= 118 && Data[DIR] >= 138 && Data[DIR] <= 168) { //后+右
//Serial.println("DOWN RIGHT");
//back + right 向右后转
digitalWrite(DC_LEFT1, LOW);
analogWrite(DC_LEFT2, DC_SPEED_LEFT * (168 - Data[DIR])/(168-128));
digitalWrite(DC_RIGHT1, LOW);
analogWrite(DC_RIGHT2, DC_SPEED_RIGHT);
}
else if (Data[RUN] >= 138 && Data[RUN] <= 168) { //前
//Serial.println("UP");
//forward 向前转
analogWrite(DC_LEFT1, DC_SPEED_LEFT); //pwm调速
digitalWrite(DC_LEFT2, LOW);
analogWrite(DC_RIGHT1, DC_SPEED_RIGHT); //pwm调速
digitalWrite(DC_RIGHT2, LOW);
}
else if (Data[RUN] >= 88 && Data[RUN] <= 118) { //后
//Serial.println("DOWN");
//back 向后转
digitalWrite(DC_LEFT1, LOW);
analogWrite(DC_LEFT2, DC_SPEED_LEFT);
digitalWrite(DC_RIGHT1, LOW);
analogWrite(DC_RIGHT2, DC_SPEED_RIGHT);
}
else if (Data[DIR] >= 88 && Data[DIR] <= 118) { //左
//Serial.println("LEFT");
//left
digitalWrite(DC_LEFT1, LOW);
analogWrite(DC_LEFT2, DC_SPEED_LEFT);
analogWrite(DC_RIGHT1, DC_SPEED_RIGHT);
digitalWrite(DC_RIGHT2, LOW);
}
else if (Data[DIR] >= 138 && Data[DIR] <= 168) { //右
//Serial.println("RIGHT");
//right
analogWrite(DC_LEFT1, DC_SPEED_LEFT); //pwm调速
digitalWrite(DC_LEFT2, LOW);
digitalWrite(DC_RIGHT1, LOW);
analogWrite(DC_RIGHT2, DC_SPEED_RIGHT);
}
else if (Data[RUN] == 128 && Data[DIR] == 128) { //停
//Serial.println("STOP");
//stop 停止
digitalWrite(DC_LEFT1,LOW);
digitalWrite(DC_LEFT2,LOW);
digitalWrite(DC_RIGHT1,LOW);
digitalWrite(DC_RIGHT2,LOW);
}
}
}效果视频:
yan 22.7.7
