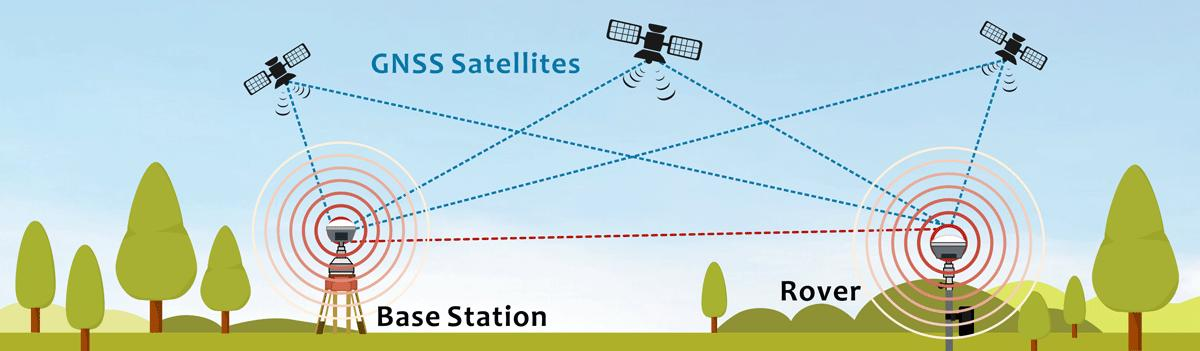
今天新到一个G70 RTK定位模块,它支持多种卫星导航系统,包括中国BDS北斗,美国GPS,俄罗斯GLONASS、欧洲Galileo,日本QZSS卫星定位系统。G70内置RTCM更正,通过本地基站或网络 RTK设置中的虚拟参考站(VRS),可以支持厘米级定位。
今天新到一个G70 RTK定位模块,它支持多种卫星导航系统,包括中国BDS北斗,美国GPS,俄罗斯GLONASS、欧洲Galileo,日本QZSS卫星定位系统。G70内置RTCM更正,通过本地基站或网络 RTK设置中的虚拟参考站(VRS),可以支持厘米级定位。

今天开始尝试使用Lidar+IMU进行3D SLAM建图,本文记录下实验过程。
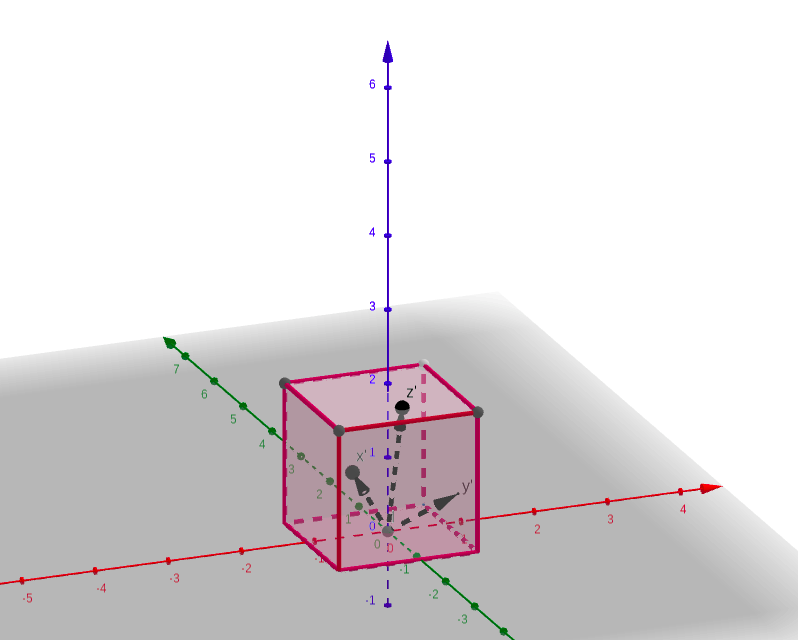
在使用LIO-SAM进行Lidar+IMU建图之前,需要做两个标定工作,IMU内参标定和Lidar-IMU外参标定。IMU内参标定,可以解决其固有的测量误差问题;Lidar和IMU的外参标定(以下简称“外参标定”)。外参标定的目的是获得激光雷达和IMU之间的位置转换关系,其中包括平移关系和旋转关系,分别对应最终输出结果中的平移向量与旋转矩阵。
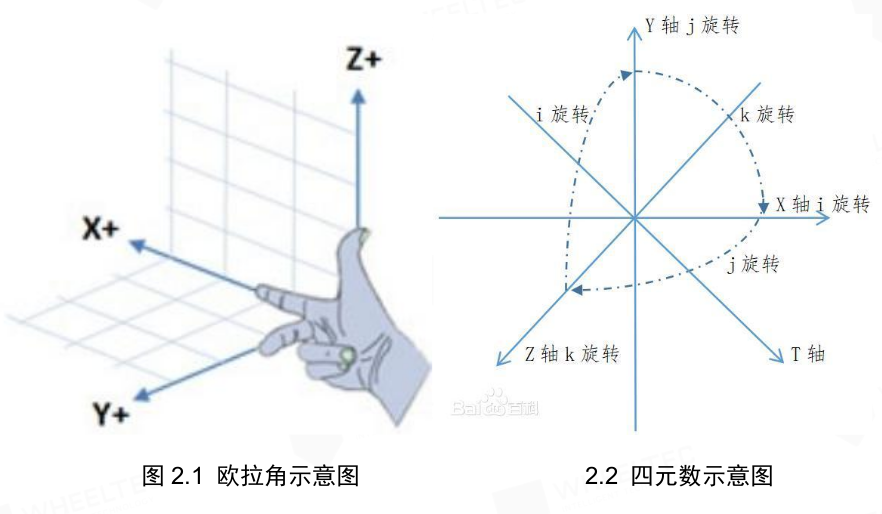
今天新到一个九轴IMU – H30,它是一款高精度的姿态传感器,集成三轴 MEMS 陀螺仪、三轴 MEMS加速度计和三轴磁传感器,可以测量载体的三维姿态角度、加速度、角速度和磁场强度信息,实现 0.1°横滚、俯仰角测量精度和 0.5°无参考航向角、1°磁参考航向角测量精度,最大输出频率200HZ。
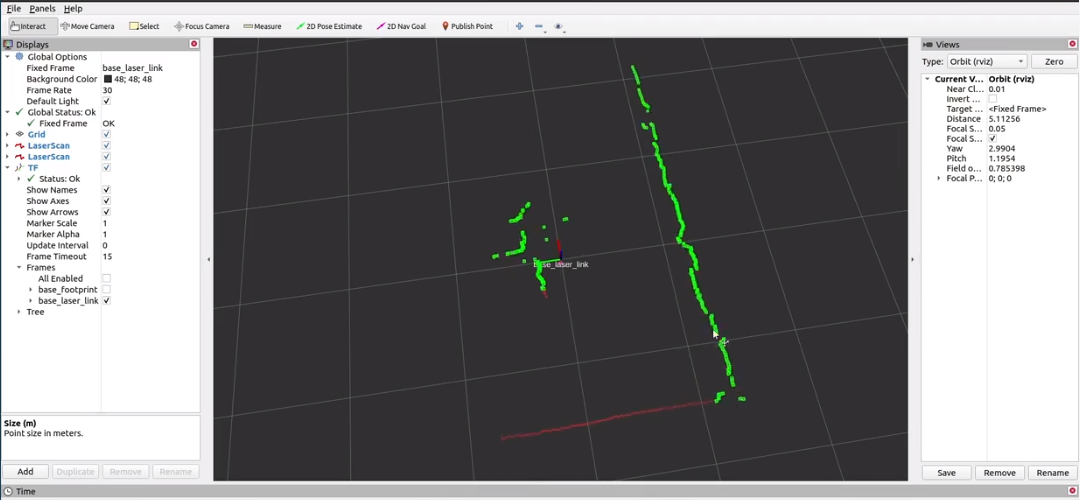
激光雷达通常可以检测360度等范围内的物体,但由于机械结构设计等原因,机器人本体可能会遮挡部分激光雷达扫描数据。如果将激光雷达原始点云直接用于建图或导航,则机器人本体的一部分会被当作障碍物导致建图或导航无法正常工作。
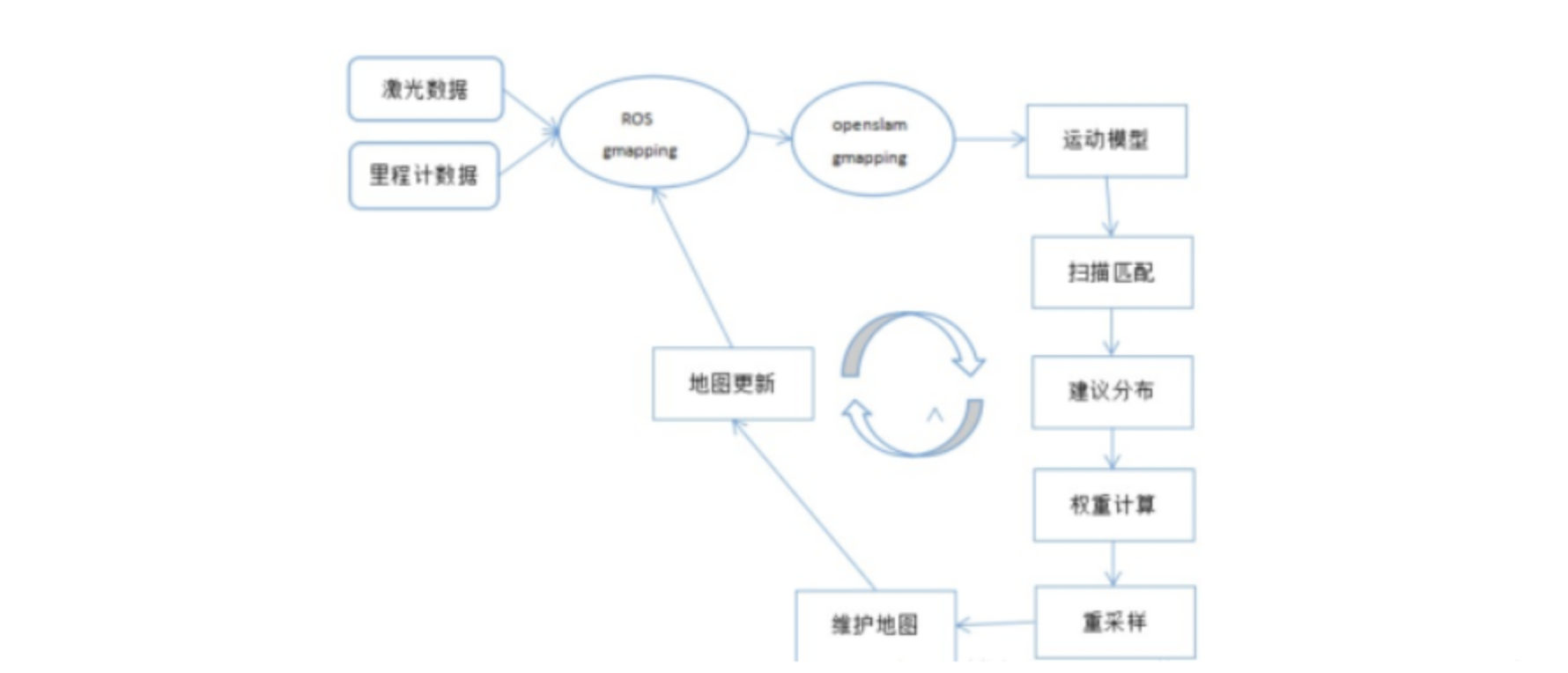
本文主要针对常见的2D建图算法Gmapping、Hector、Karto、Cartographer进行对比,以确定在室内小场景、室外大场景下使用哪种建图算法更为合适。
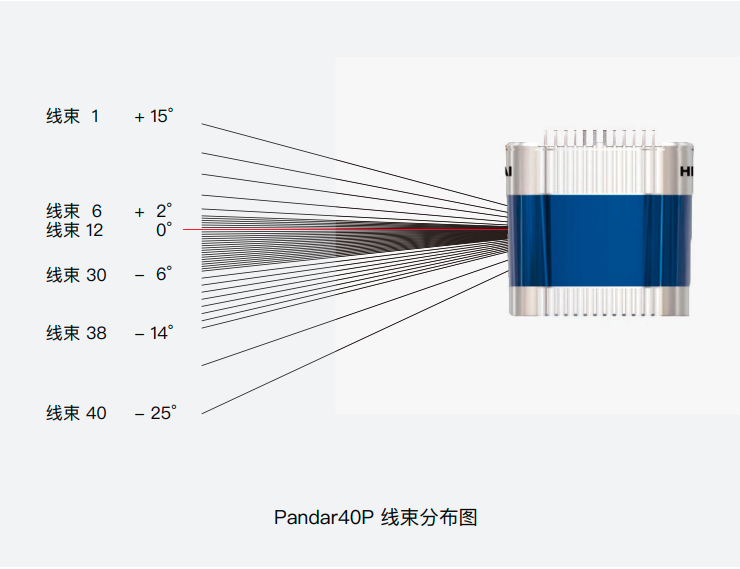
Pandar40P是一款机械旋转式40线激光雷达,其内部包含40个激光器,通过360°旋转实现3D成像。Pandar40P独特的角度分布,使其更加适用于自动驾驶。
ROS1官方不再支持Ubuntu 22.04,如果想在22.04 使用ROS1 Noetic一般只能自己编译整套ROS, 需要解决数量众多的库依赖和 C++ 版本兼容问题,对于初学者来说是个不小的挑战。
今天教大家一个快速安装ROS环境的方法:

最近使用摄像头做三维重建和激光雷达联合建图,发现摄像头所还原的三维点云与激光雷达的点云在不少位置存在明显偏差。使用两个点云构建的地图进行导航对比,还是激光雷达的更加精准,此时很有可能是摄像头的标定不精准导致的,本文就主要讲下如何对摄像头进行标定。

主流的激光SLAM算法有hector、gmapping、karto、cartographer。很多同学使用ROS默认自带的gmapping、hector等比较多,这次带大家一起尝试下传说中的google cartographer,看看效果差别有多大。
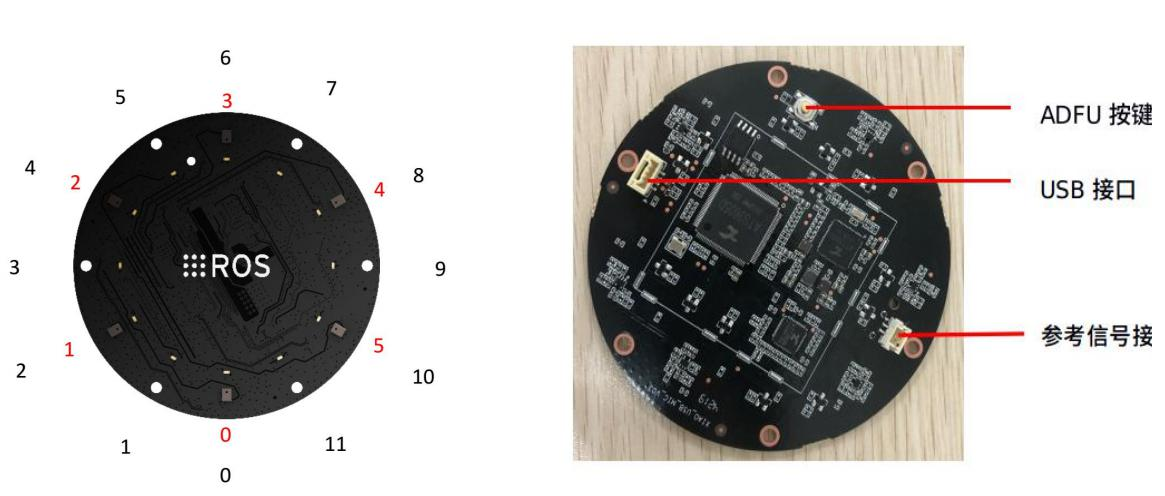
上一次带大家实践视觉建图与导航后,有朋友留言想给机器人增加语音控制功能,本文就带大家一起实现。为了使效果更佳,例如当叫机器人“过来”、“到我这来”等时,需要机器人能找到说话所在的方向,所以我们将采用麦克风阵列。

上一次,我们实现了激光雷达+自研底盘的SLAM建图和导航。这次将带大家学习如何使用深度相机实现机器人的视觉SLAM建图及导航。

我们完成SLAM建图后,如何在导航时让自己的底盘正常工作,是很多新手面临的问题。上位机大家通常采用pi或nvidia jetson nano甚至更强算力的板子,系统一般采用ubuntu,这使得上位机的库几乎是通用的;而底盘不同,单片机有stm32、arduino、51等,电机的种类就更多了,电机的精准度和质量参差不齐,容易在底盘动起来后难以实现精准控制。如何利用电机编码器进行精准的底盘移动并上报odom,不少人会在这里花费大量时间,本文将针对此类问题进行具体讲解。
之前学习ros,nvidia jetson nano板子装的ubuntu18.04系统比较正常,但是pi4b的板子装的raspberry系统会出现各种依赖问题。最近想充分利用下几块Pi4B的板子,反复试了pi4安装官方/非官方的ubuntu18.04.5+ROS Melodic版本,最终都会卡在map-server或rviz等依赖上。最终用Pi4B + Ubuntu20.04.3 + ROS Noetic + RpLidar安装测试成功,记录一下安装过程。
在测试ros的slam建图,建好地图使用时,出现一个很诡异的现象:在rviz上里点击”2D Nav Goal”按钮指定目的地时机器人没反应,也没有任何错误日志,像是就没发出去似的。
ROS 机器人的实验和开发中,通常需要一台移动机器人和一台 PC 配合使用,不少初学者都会有个困惑,即PC和机器人上的ROS命令都只针对本机,而机器人上的ubuntu通常都不是桌面版,那么PC上那些可视化的工具怎么应用在机器人上呢?即怎么才能利用PC上的ROS指令和工具直接访问和展示机器人上的数据呢?其实非常简单,通过ROS_MASTER_URI就可以方便的实现,本文我们就来简单介绍一下吧。
移动机器人在环境中获取障碍物的具体位置、房间的内部轮廓等信息都是非常必要的,这些信息是机器人创建地图、进行导航的基础数据。考虑成本,买了一个SLAMTEC公司的低成本二维激光雷达RpLidar A1进行初步的学习,它可以最快10hz的频率检测360度范围内的障碍物信息,最远检测距离12米,适合室内移动机器人使用。本文讲解如何使用它感知周围环境。
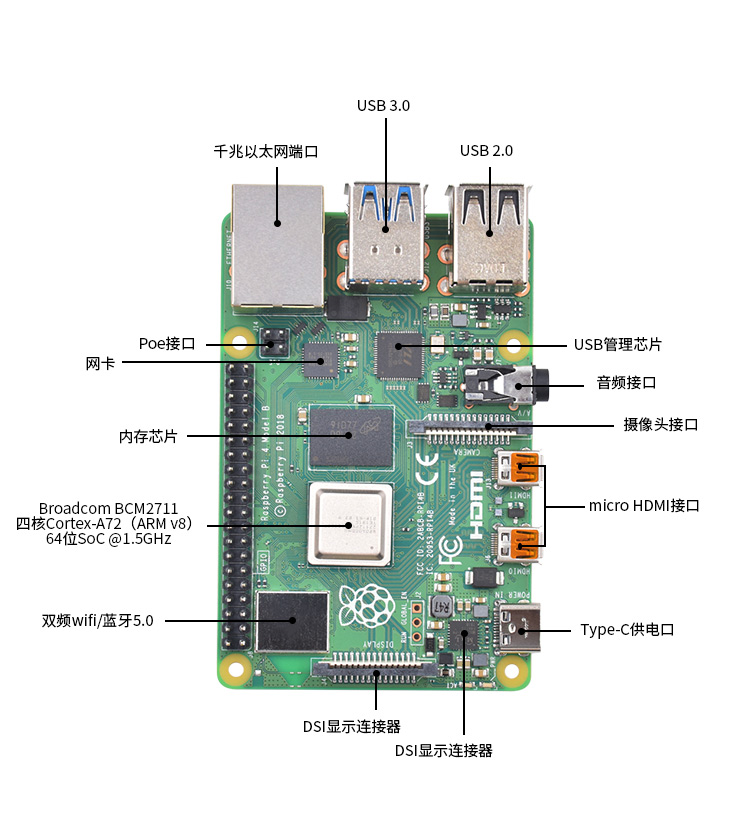
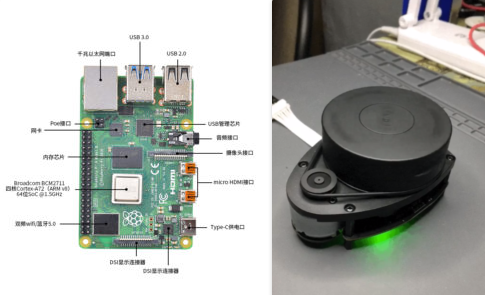
新入手一个Pi4,4核1.5GHz 64位A72处理器、8G内存(想起我的第一台电脑,赛扬处理器+512M内存…),用来做机器人的控制中心。由于树莓派4暂时还无法使用Ubuntu MATE,本文讲解给它安装Raspberry Pi OS系统 + ROS Melodic的过程。

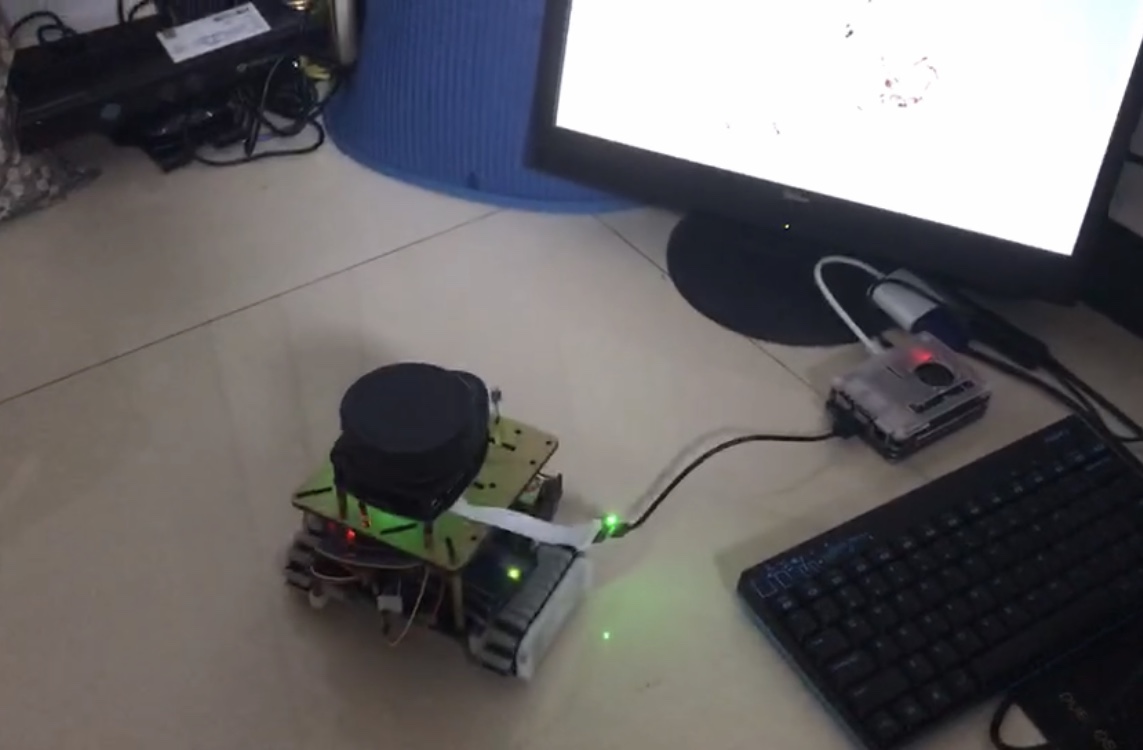
最近学习ROS,涉及底盘移动等执行机构时,发现买robot套件太贵了,又懒得从pi上直接开发,翻箱倒柜找到一个以前跟儿子一起做的arduino履带坦克,就拿它作ros机器人的action执行机构吧。