一、背景
上一次,我们使用Autoware成功进行了ndt定位和导航,但是GNSS初始定位以及修正功能没有正常生效。行走途中遇到剧烈颠簸、非常狭小的空间、遮挡严重、或其他ndt局部定位特征不足时,ndt_matching会找不到自己位置导致定位飞。
由于rtk定位精度<10cm,在信号好且途中定位质量差或初始化定位失败时,很有必要使用GNSS进行修正下定位。本文就针对这块单独讲下怎么处理。

二、定位原理
由于小车底盘老跑偏,odom论速计不准,本文主要使用IMU+RTK。
三、启用GNSS定位
1. 修改tix2tfpose配置
fix2tfpose包通过订阅fix,发布gps定位topic为/gnss_pose。我们启用GNSS时,除了use_gnss设置为1以外,还需要修改gps fix的topic名称:
# 修改fix2tfpose的gps topic为外部参数传入
vim Autoware/src/autoware/core_perception/gnss_localizer/nodes/fix2tfpose/fix2tfpose.cpp
private_nh.getParam("gps_topic", _gps_topic);
pose_publisher = nh.advertise<geometry_msgs::PoseStamped>("gnss_pose", 1000);
stat_publisher = nh.advertise<std_msgs::Bool>("/gnss_stat", 1000);
ros::Subscriber gnss_pose_subscriber = nh.subscribe(_gps_topic, 100, GNSSCallback);
vim Autoware/src/autoware/core_perception/gnss_localizer/launch/fix2tfpose.launch
<arg name="plane" default="7"/>
<arg name="gps_topic" default="gps/fix"/>
<node pkg="gnss_localizer" type="fix2tfpose" name="fix2tfpose" output="log">
<param name="plane" value="$(arg plane)"/>
<param name="gps_topic" value="$(arg gps_topic)"/>
</node>
# 编译
cd ~/Autoware
colcon build --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Release --packages-select=gnss_localizer
# 运行测试确认节点订阅关系正常
roslaunch gnss_localizer fix2tfpose.launch plane:=7 gps_topic:=/gps/fix
rosrun rqt_graph rqt_graph
# 检查/gnss_pose是否正常输出
rostopic echo /gnss_pose
2. 验证GNSS定位是否生效
启动播包和定位可以看到fix2pose已经生效,但是输出的/gnss_pose与map frame有一个距离:
# 启动播包、gnss定位
roslaunch autolaunch run.launch use_gnss:=1 rviz:=true map_name:=jingheyuan bag_file:=/home/autoware/shared_dir/bag/map-8-jhy-gps/map-8-jhy-gps-241203-2301.bag
# 查看/gnss_pose与/ndt_pose发布的数据是否基本一致,如果基本一致,那么成功(我们这里还对不上,别着急)
rostopic echo /gnss_pose
rostopic echo /ndt_pose
四、GNSS定位与NDT定位位姿的旋转矩阵
刚才我们已经尝试让Autoware的GNSS定位生效了,但是它的位置与map位置无法匹配,因此我们还需要计算GNSS定位与NDT定位位姿的旋转矩阵,让GNSS和NDT Matching的定位能匹配上。
1. 修改 geo_pos_conv.cpp 初始化度分位置
geo_pos_conv.cpp 主要实现地理位置转换器的功能,将纬度、经度、高度坐标(LLH) 转化为笛卡尔坐标 (XYZ) 。使用“set_plane”函数根据 runtime 设置的参数输入对应纬度和经度设置平面,获得的 XYZ 坐标。
修改 void geo_pos_conv::set_plane(int num)函数,̀set_plane` 函数重载采用纬度 (`lat`) 和经度 (`lon`) 值,并相应地设置成员变量 `m_PLato` 和 `m_PLo`。根据整数 num 的值输出不同平面对应的预定义值设置纬度和经度。按照以下方式修改 num=7 时的代码块:
vim Autoware/src/autoware/common/gnss/src/geo_pos_conv.cpp
void geo_pos_conv::set_plane(int num) {
...
else if (num == 7) {
/*lon_deg = 36;
lon_min = 0;
lat_deg = 137;
lat_min = 10;*/
// 这里修改为你自己所在地的经纬度分
lon_deg = 40;
lon_min = 2;
lat_deg = 116;
lat_min = 15;
...
}
# 修改完需要先编译以下,等下计算旋转矩阵要用到
cd ~/Autoware
colcon build --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Release --packages-select=gnss例如我所在地区的wgs84经纬度为longitude,latitude: 116.260100°,40.048550°,将经纬度转换度分秒的方式:
- 将度(DDD)换算成度分秒(DMS)。
- 东经 116.260100 度:转换方法是将 116.260100 整数位不变取 116(度);0.260100*60=15.6060265,取整数位 15(分);0.6060265*60=36.36159再取整数位 36(秒)。故对应度分秒为:东经 116 度 15 分 36 秒。
- 北纬40.048550 度:整数位不变取 40(度);0.048550*60=2.913,取整数位 2(分);0.913*60=54.78,取整为54(秒)。故对应度分秒为:40 度 2 分 54 秒。
- 也可以使用在线转换工具:https://www.lddgo.net/convert/degree-convert
- 输入116.260100°,40.048550°,点击“度->度分秒”转换按钮,得到116°15’36”,40°2’54”
- 这里的度分并不要求必须是精确的起点坐标,只要是所在城市的坐标,基本就问题不大。
2. 计算GNSS与地图的旋转矩阵
只修改 geo_pos_conv.cpp 文件地图和 pcd 点云还是无法对齐,需要加入旋转矩阵,将源坐标系(map)中的点变换到目标坐标系中。
每个地理位置的旋转矩阵参数都是不同的。要获取旋转矩阵的步骤,需要先打开地图定位功能,可以使用数据包定位,也可以使用小车完成实时定位。下面以 rosbag 为例,简述操作步骤。
2.1 确保ndt matching处于定位成功状态
# 启动播包、定位模块(注意此时需要先关闭GNSS定位功能)
roslaunch autolaunch run.launch map_name:=jingheyuan rviz:=true use_gnss:=0 bag_file:=/home/autoware/shared_dir/bag/map-8-jhy-gps/map-8-jhy-gps-241203-2301.bag
# 检查use_gnss参数状态
rosparam get /ndt_matching/use_gnss
0
# 确保rtk是生效的(status >= 2)
rostopic echo /gps/fix如果ndt不能自行定位,先手动设置下初始位姿,确保地图处于匹配状态后,按空格暂定播包:
2.2 计算旋转矩阵
启动计算旋转矩阵节点(此时数据包还处于暂停播放状态):
rosrun turn_on_wheeltec_robot gnss_matrix.py这个节点的功能是等待接收到足够数量的样本(/ndt_pose 和/gnss_pose 的话题数据,所使用的数据包需要录制大概三分钟),执行矩阵计算(刚性变换)并打印结果。
2.3. 继续播放bag,输出旋转矩阵
开始播放数据,等待3分钟左右,gnss_matrix.py会输出旋转矩阵:

我们需要的是最下边的r martrix、t matrix,它是:
r matrix:
[[ 0.99708656 -0.07450855 -0.016336 ]
[ 0.06207712 0.91707773 -0.39384626]
[ 0.0443263 0.39168472 0.91903115]]
t matrix:
[ -729.95410472 -1585.00749103 -732.72186379]*注:如果出现 nan 无效值,只需要再执行一次以上所有步骤重新计算即可。
2.4 设置旋转矩阵
根据 gnss_matrix 节点算出的旋转矩阵,填入 geo_pos_conv.cpp 文件中,修改末尾处的 R 和 T 参数。
vim Autoware/src/autoware/common/gnss/src/geo_pos_conv.cpp
#if 1
// debug gnss localtor
Eigen::Matrix3f R;
Eigen::RowVector3f T;
Eigen::RowVector3f m_3;
Eigen::RowVector3f m_4;
// 原始笛卡尔坐标( m_y, m_x, m_z)分配给m_3向量,赋值顺序为y,x,z
m_3 << m_y, m_x, m_z;
/*
R << 1, 0, 0,
0, 1, 0,
0, 0,1;
T << 0, 0, 0;
*/
// 旋转矩阵R是一个3x3矩阵,每行代表旋转后变换轴的方向
R << 0.99708656, -0.07450855, -0.016336,
0.06207712, 0.91707773, -0.39384626,
0.0443263, 0.39168472, 0.91903115;
// 平移动向量T表示旋转后应用于坐标的位移
T << -729.95410472, -1585.00749103, -732.72186379;
// 变换后的坐标m_4是通过将原始坐标m_3乘以喜欢转矩阵R.transpose()的转置,然后加上平移向量得到的T
m_4 = m_3 * R.transpose() + T;
// 将转换后的坐标m_4分配回m_x,m_y,m_z变量,赋值顺序为y,x,z
m_y = m_4[0];
m_x = m_4[1];
m_z = m_4[2];
#endif2.5 编译
修改完成后,单独编译该功能包:
cd ~/Autoware
colcon build --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Release --packages-select=gnss3. NDT+GNSS联合定位验证
3.1 GNSS定位验证
# 启动播包、gnss定位
roslaunch autolaunch run.launch use_gnss:=1 rviz:=true map_name:=jingheyuan bag_file:=/home/autoware/shared_dir/bag/map-8-jhy-gps/map-8-jhy-gps-241203-2301.bag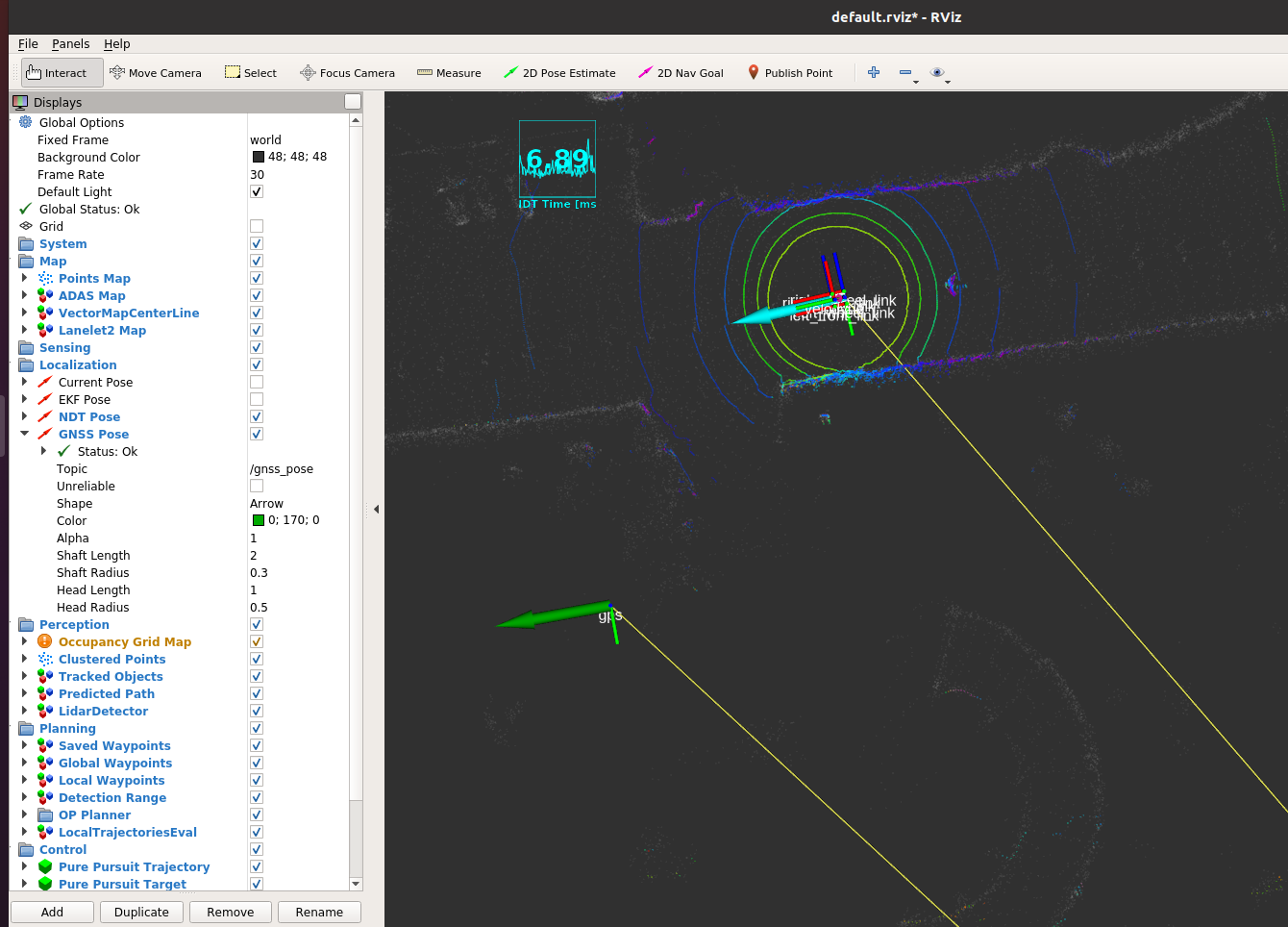
可以看到虽然不像之前偏离那么远了,但是依然是有偏差的,可能是初始化的时候gnss定位不准,我这里等播包一定gnss稳定后再进行矩阵计算:
注:重跑时,一定要先恢复R/原始值,编译后再跑gnss_matrix(否则跑出来会是相对之前旋转的基础上再旋转的值)
R << 1, 0, 0,
0, 1, 0,
0, 0,1;
T << 0, 0, 0;得到一组新的矩阵:
r matrix:
[[ 0.99961893 0.01157622 -0.02505958]
[-0.00929102 0.99594709 0.08945991]
[ 0.02599362 -0.08919299 0.99567512]]
t matrix:
[ -877.05005961 -1675.08312445 91.9169504 ]
设置并编译gnss后确认效果:
// 旋转矩阵R是一个3x3矩阵,每行代表旋转后变换轴的方向
R << 0.99961893, 0.01157622, -0.02505958,
-0.00929102, 0.99594709, 0.08945991,
0.02599362, -0.08919299, 0.99567512;
// 平移动向量T表示旋转后应用于坐标的位移
T << -877.05005961, -1675.08312445, 91.9169504;
*注:gps的定位,不是很稳定,有时可以跟ndt完全匹配,有时会偏移到两侧,距离再5-20cm左右波动,像是RTK定位精度问题。
3.2 手动修正矩阵
这里如果相对关系很稳定的话,也可以手动微调平移动向量T来解决:
- 播包后暂停,查看gps_pose位置与实际地图位置的相对偏移关系,修改偏移参数
- R值决定gnss_pose相对地图的旋转角度:
- 这个我发现好像在平地上的话用默认的就可以,所以我先把这里恢复成默认值编译,再单独调T矩阵
- 这里不用旋转角度的原因是我的GNSS+IMU比较便宜,它自己不太容易找到方向,但是可以确定位置,所以就不配置旋转角了
- T值的三个值决定gnss_pose在地图中的偏移位置:
- 第一个值:南北距离,值越大越靠北(相对2D地图也就是越靠上),单位米
- 第二个值:东西距离,值越大越靠东(相对2D地图也就是越靠右),单位米
- 第三个值:相对地面高度,值越大高度越高(打开rviz 3D视角确认gap),单位米
最终,我还是自己手动标了一个矩阵,编译后,初始化定位需要先让车走上几米,他即可自己初始化定位成功;行驶途中估计把当前位置改称成错的,基本5s之内可以根据GNSS坐标自动修正回来:
R << 1, 0, 0,
0, 1, 0,
0, 0,1;
T << -858.55005961, -1687.08312445, -36.5;*注:需要5s的原因是我的GNSS+IMU航向角数据特别差,找不着北,只能根据大概10-20厘米误差的方位辛苦ndt去matching了。
这个实际上车发现,这个方法有改善但是不多,走完全程的定位稳定性相较不使用gnss更差了。其他地图有坡度或高度差的地方,这样的方法依然比较难match上。经过研究,在这一步的基础上再做一些修改即可达到比较好的效果。
五、改善GNSS定位修正方法
上边的方法,在pc上仿真效果还可以,但是实际使用时,当出现ndt定位不成功,会频繁的ndt和gnss的定位来回切无法成功修正,rviz画面闪瞎我的狗眼,想手动点下都不行,突发奇想,为啥子不让它自动执行一个这个操作呢?来动手试一试:
vim Autoware/src/autoware/core_perception/lidar_localizer/nodes/ndt_matching/ndt_matching.cpp
static double _gnss_reinit_fitness = 1.0;
static void gnss_callback(const geometry_msgs::PoseStamped::ConstPtr& input)
{
...
// 启用GNSS但尚未初始化位姿,或ndt定位质量太差(/ndt_stat.score>500,分数越大matching质量越差)时
if ((_use_gnss == 1 && init_pos_set == 0) || fitness_score >= _gnss_reinit_fitness)
{
// 直接使用gnss当前位姿态重置初始位姿,以修正定位飘问题(发送topic而不是直接调用initialpose_callback的原因是要同步通知给op_global_planner)
geometry_msgs::PoseWithCovarianceStamped initialpose_msg;
initialpose_msg.header = input->header;
initialpose_msg.pose.pose = input->pose;
initialpose_msg.pose.covariance[0] = 0.25;
initialpose_msg.pose.covariance[6 * 1 + 1] = 0.25;
initialpose_msg.pose.covariance[6 * 5 + 5] = 0.06853892326654787;
initialpose_pub.publish(initialpose_msg);
init_pos_set = 1;
// !!!注释掉这个if里的其他代码,增加上边这部分,如果区分初始化/行驶过程总的场景区别处理下效果会更好
}
...
int main(){
private_nh.param<double>("gnss_reinit_fitness", _gnss_reinit_fitness, 1.0);
}
}
vim Autoware/src/autolaunch/launch/localization.launch
<include file="$(find lidar_localizer)/launch/ndt_matching.launch">
...
<arg name="gnss_reinit_fitness" default="1.0" /> <!-- ndt_matching分数大于1.0时,基本就已经飘了,这时应该用gnss_pose重置一下 -->
</include>
# 编译
colcon build --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Release --packages-select=lidar_localizer
# 启动播包、ndt+gnss定位
roslaunch autolaunch run.launch use_gnss:=1 rviz:=true map_name:=jingheyuan bag_file:=/home/autoware/shared_dir/bag/map-8-jhy-gps/map-8-jhy-gps-241203-2301.bag
# 查看ndt+gnss pose、定位质量
rostopic echo /ndt_pose
rostopic echo /gnss_pose
rostopic echo /ndt_stat # 看score,>1.0基本都是平飘了重新试下,从之前ndt pose与gnss pose反复拉扯的状态,到偏移后大概率可以重定位成功(gnss pose距离真实位置偏差2米范围内,且周围有足够的特征时),速度也比之间快了很多。
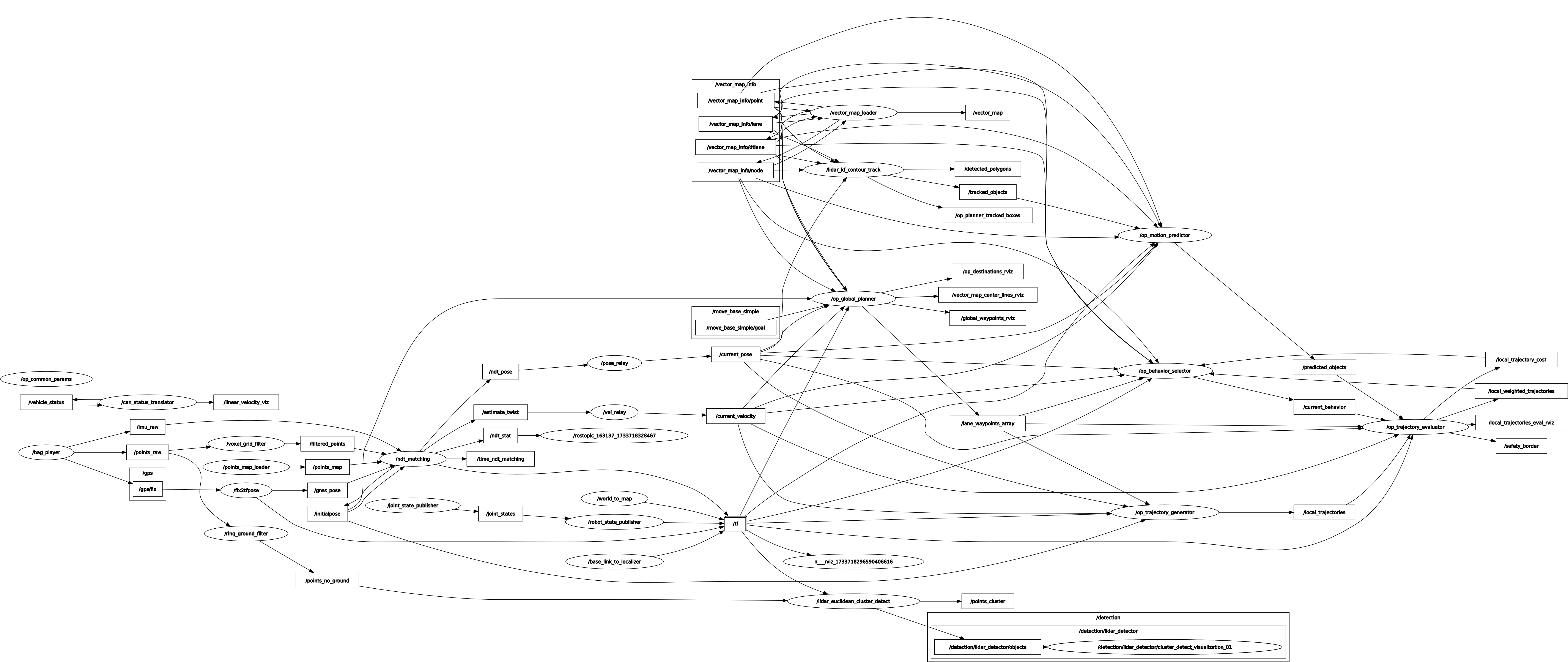
最终的节点关系图:
六、总结
今天还是很有收获的,GNSS定位的介入对NDT match特征不足时定位飘问题有改善,GNSS修正定位的主要影响因素如下:
- GNSS信号质量需要有保障,不能偏差太大,至少需要确保gnss pose与实际位置偏差再1-2米内,20cm内效果最佳;
- GNSS修正后,NDT match需要周围有足够的特征,如果特征不够,NDT match会再次飘,并被GNSS再次修正,直到match score<1.0;
- 初始GNSS定位时,车辆最好先向前运动1-2米,这样GNSS将或获得稳定的航向,对自动GNSS初始定位成功很有帮助;这个问题也可以通过带稳定航向的9轴ARHS来解决(实际上,很多号称9轴的IMU,实际只能用到VRU,磁力航向基本不可用,打开ARHS不但航向不准,反而会导致连6轴指标也不满足了,谁有可靠性强的便宜9轴IMU请给我留言,谢谢)。
今天可以快乐的睡觉了。
参考:
