移动机器人在环境中获取障碍物的具体位置、房间的内部轮廓等信息都是非常必要的,这些信息是机器人创建地图、进行导航的基础数据。考虑成本,买了一个SLAMTEC公司的低成本二维激光雷达RpLidar A1进行初步的学习,它可以最快10hz的频率检测360度范围内的障碍物信息,最远检测距离12米,适合室内移动机器人使用。本文讲解如何使用它感知周围环境。
一、准备工作
1、安装ros对应驱动功能包rplidar
sudo apt install ros-melodic-rplidar-ros2、硬件连接
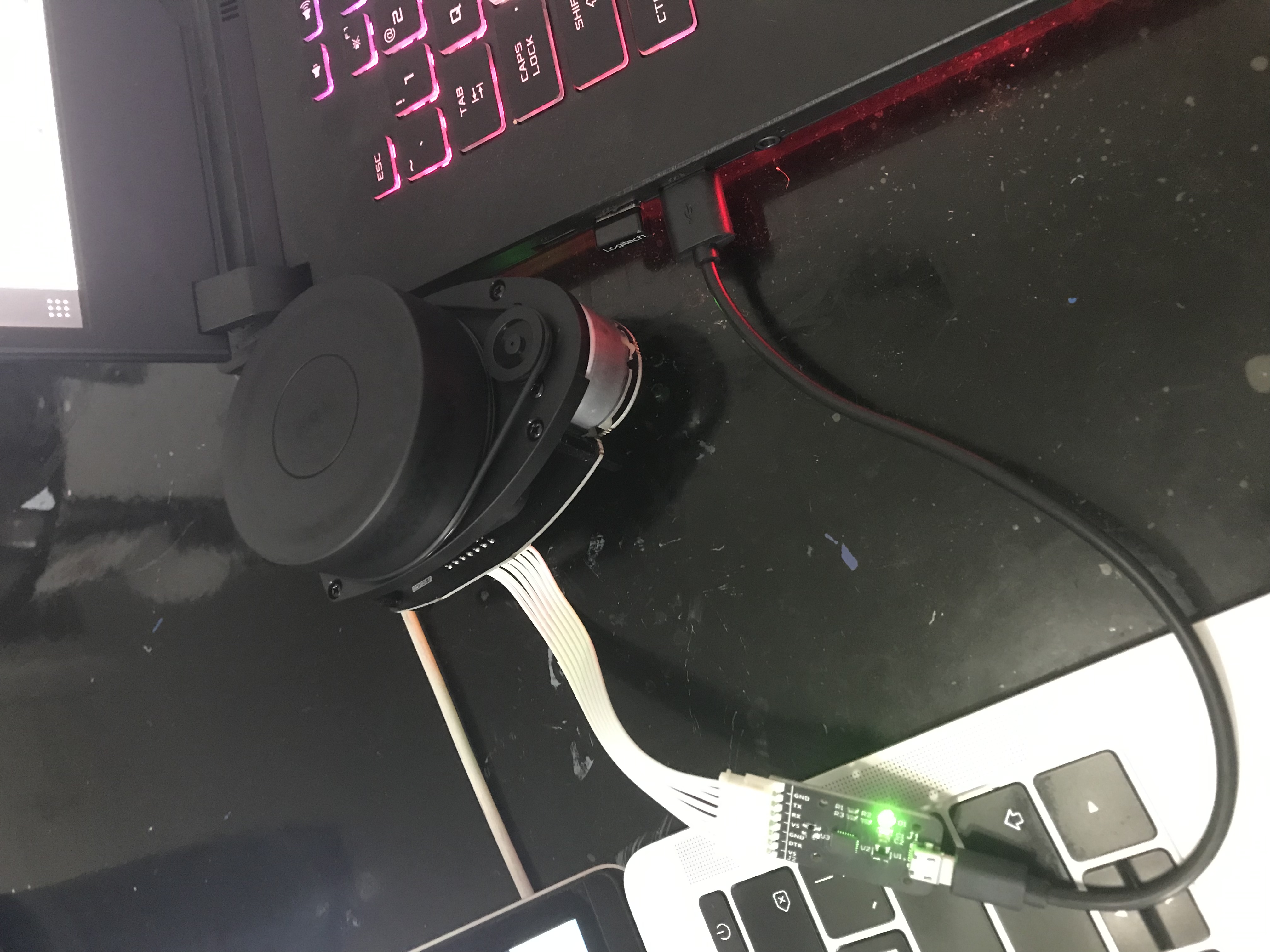
接好连接线并插到usb口上,激光雷达会开始旋转。
检查激光雷达是否被正常识别:
lsusb|grep Cygnal
二、测试激光雷达
1、启动激光node节点
roscore
rosrun rplidar_ros rplidarNode
[ INFO] [1593424905.411970119]: RPLIDAR running on ROS package rplidar_ros. SDK Version:1.7.0
RPLIDAR S/N: CCE39A87C5E392D5A5E492F85C36316B
[ INFO] [1593424907.918969787]: Firmware Ver: 1.25
[ INFO] [1593424907.919051349]: Hardware Rev: 5
[ INFO] [1593424907.920679886]: RPLidar health status : 0
2、查看激光雷达topic输出的数据
# 查看topic
rostopic list -v|grep scan
* /scan [sensor_msgs/LaserScan] 1 publisher
# 查看输出数据格式定义
rosmsg show sensor_msgs/LaserScan
std_msgs/Header header
uint32 seq
time stamp
string frame_id
float32 angle_min
float32 angle_max
float32 angle_increment
float32 time_increment
float32 scan_time
float32 range_min
float32 range_max
float32[] ranges
float32[] intensities
# 输出topic内容
rostopic echo /scan
三、激光数据可视化
# 使用rplidar功能包在rviz中查看激光雷达数据(frame=laser、RPLidarLaserScan Topic=/scan)
roslaunch rplidar_ros view_rplidar.launch
四、使用激光雷达进行SLAM定位建图
SLAM(Simultaneous Localization and Mapping 实时定位与建图)可以简单的理解为机器人在未知环境中从一个未知位置开始移动,移动过程中根据位置估计和地图进行自身定位,同时生成增量式地图,以实现机器人在未知环境中的自主定位和导航。
要完成机器人的slam和自主导航,机器人首先要有感知周围环境的能力,尤其要有感知深度(即距离)信息的能力,激光雷达(价格贵)、双目摄像头(标定较为复杂、运算量大)、RGB-D摄像头(视野窄、盲区大、噪声大)都具备探测深度的能力。
目前slam有较多的开源实现,例如gmapping、hector_slam、cartographer、rgbdslam、orb_slam、move_base、amcl等。本文不详细讨论slam的算法实现,先教会大家怎么使用这些开源库,在后续文章中再深入学习。
# 安装依赖包
sudo apt install ros-melodic-fake-localization ros-melodic-map-server ros-melodic-hector-slam ros-melodic-gmapping ros-melodic-slam-gmapping ros-melodic-open-karto ros-melodic-slam-karto
# 新建ros程序包
cd ~/catkin_ws/src
# catkin_create_pkg <package_name> [depend1] [depend2] [depend3]
catkin_create_pkg ros_slam_rplidar std_msgs rospy roscpp
# 编辑slam launch
cd ~/catkin_ws/src/ros_slam_rplidar/launch/slam/
vim hector.launch #不需要里程计数据,只根据激光信息即可构建地图
<!--
notice : you should install hector-slam at first, sudo apt-get install ros-melodic-hector-slam
this launch just for test, you should improve the param for the best result.
-->
<launch>
<node pkg="tf" type="static_transform_publisher" name="link1_broadcaster" args="1 0 0 0 0 0 base_link laser 100" /> <!--change -->
<node pkg="hector_mapping" type="hector_mapping" name="hector_height_mapping" output="screen">
<param name="scan_topic" value="scan" />
<param name="base_frame" value="base_link" />
<param name="odom_frame" value="base_link" />
<param name="output_timing" value="false"/>
<param name="advertise_map_service" value="true"/>
<param name="use_tf_scan_transformation" value="true"/>
<param name="use_tf_pose_start_estimate" value="false"/>
<param name="pub_map_odom_transform" value="true"/>
<param name="map_with_known_poses" value="false"/>
<param name="map_pub_period" value="0.5"/>
<param name="update_factor_free" value="0.45"/>
<param name="map_update_distance_thresh" value="0.02"/>
<param name="map_update_angle_thresh" value="0.1"/>
<param name="map_resolution" value="0.05"/>
<param name="map_size" value="1024"/>
<param name="map_start_x" value="0.5"/>
<param name="map_start_y" value="0.5"/>
</node>
</launch>
vim gmapping.launch #需要IMU+里程计+激光信息构建地图
<!--
notice : you should install gmapping-slam at first, command 'sudo apt-get install ros-indigo-gmapping'and 'sudo apt-get install ros-indigo-slam-gmapping'.
this launch just for test, you should improve the param for the best result.
you nedd change the frame of the "static_transform_publisher" when using the real robot platform.
it is better subscribe the topic /odom with true to slam in gmapping
-->
<launch>
<node pkg="tf" type="static_transform_publisher" name="link1_broadcaster" args="0 0 0 0 0 0 base_link laser 100" /> <!--change -->
<node pkg="tf" type="static_transform_publisher" name="link2_broadcaster" args="0 0 0 0 0 0 odom base_link 100" /> <!--change -->
<node pkg="gmapping" type="slam_gmapping" name="simple_gmapping" output="screen">
<!--remap from="scan" to="base_scan"/-->
<param name="map_update_interval" value="5.0"/>
<param name="maxUrange" value="8.0"/>
<param name="sigma" value="0.05"/>
<param name="kernelSize" value="1"/>
<param name="lstep" value="0.05"/>
<param name="astep" value="0.05"/>
<param name="iterations" value="5"/>
<param name="lsigma" value="0.075"/>
<param name="ogain" value="3.0"/>
<param name="lskip" value="0"/>
<param name="minimumScore" value="50"/>
<param name="srr" value="0.1"/>
<param name="srt" value="0.2"/>
<param name="str" value="0.1"/>
<param name="stt" value="0.2"/>
<param name="linearUpdate" value="0.3"/>
<param name="angularUpdate" value="0.4"/>
<param name="temporalUpdate" value="3.0"/>
<param name="resampleThreshold" value="0.5"/>
<param name="particles" value="30"/>
<param name="xmin" value="-5.0"/>
<param name="ymin" value="-5.0"/>
<param name="xmax" value="5.0"/>
<param name="ymax" value="5.0"/>
<param name="delta" value="0.05"/>
<param name="llsamplerange" value="0.01"/>
<param name="llsamplestep" value="0.01"/>
<param name="lasamplerange" value="0.005"/>
<param name="lasamplestep" value="0.005"/>
</node>
</launch>
vim karto.launch
<!--
notice : you should install karto-slam at first, command 'sudo apt-get install ros-indigo-open-karto'and 'sudo apt-get install ros-indigo-slam-karto'.
this launch just for test, you should improve the param for the best result.
you nedd change the frame of the "static_transform_publisher" when using the real robot platform.
it is better subscribe the topic /odom with true to slam in gmapping
-->
<launch>
<node pkg="tf" type="static_transform_publisher" name="link1_broadcaster" args="0 0 0 0 0 0 base_link laser 100" /> <!--change -->
<node pkg="tf" type="static_transform_publisher" name="link2_broadcaster" args="0 0 0 0 0 0 odom base_link 100" /> <!--change -->
<node pkg="slam_karto" type="slam_karto" name="slam_karto" output="screen">
<remap from="scan" to="scan"/>
<param name="odom_frame" value="odom"/>
<param name="map_update_interval" value="25"/>
<param name="resolution" value="0.025"/>
<rosparam command="load" file="$(find ros_slam_rplidar)/launch/slam/karto_mapper_params.yaml" />
</node>
</launch>
vim karto_mapper_params.yaml
# General Parameters
use_scan_matching: true
use_scan_barycenter: true
minimum_travel_distance: 0.3
minimum_travel_heading: 0.4 # 0.2 #in radians
scan_buffer_size: 67
scan_buffer_maximum_scan_distance: 20.0
link_match_minimum_response_fine: 0.6
link_scan_maximum_distance: 4 # 6
do_loop_closing: true
loop_match_minimum_chain_size: 5
loop_match_maximum_variance_coarse: 0.4 # gets squared later
loop_match_minimum_response_coarse: 0.4 # 0.6
loop_match_minimum_response_fine: 0.6
# Correlation Parameters - Correlation Parameters
correlation_search_space_dimension: 2
correlation_search_space_resolution: 0.05
correlation_search_space_smear_deviation: 0.05
# Correlation Parameters - Loop Closure Parameters
loop_search_space_dimension: 10 # 2.8
loop_search_space_resolution: 0.1
loop_search_space_smear_deviation: 0.05
loop_search_maximum_distance: 4.0
# Scan Matcher Parameters
distance_variance_penalty: 0.3 # gets squared later
angle_variance_penalty: 0.35 # in degrees (gets converted to radians then squared)
fine_search_angle_offset: 0.00349 # in degrees (gets converted to radians)
coarse_search_angle_offset: 0.349 # in degrees (gets converted to radians)
coarse_angle_resolution: 0.0349 # in degrees (gets converted to radians)
minimum_angle_penalty: 0.9
minimum_distance_penalty: 0.5
use_response_expansion: false
# 编辑slam rviz
cd ~/catkin_ws/src/ros_slam_rplidar/rviz/
vim slam.rviz
Panels:
- Class: rviz/Displays
Help Height: 78
Name: Displays
Property Tree Widget:
Expanded:
- /Global Options1
- /Status1
- /RPLidarLaserScan1
Splitter Ratio: 0.5
Tree Height: 413
- Class: rviz/Selection
Name: Selection
- Class: rviz/Tool Properties
Expanded:
- /2D Pose Estimate1
- /2D Nav Goal1
Name: Tool Properties
Splitter Ratio: 0.588679
- Class: rviz/Views
Expanded:
- /Current View1
Name: Views
Splitter Ratio: 0.5
- Class: rviz/Time
Experimental: false
Name: Time
SyncMode: 0
SyncSource: RPLidarLaserScan
Visualization Manager:
Class: ""
Displays:
- Alpha: 0.5
Cell Size: 1
Class: rviz/Grid
Color: 160; 160; 164
Enabled: true
Line Style:
Line Width: 0.03
Value: Lines
Name: Grid
Normal Cell Count: 0
Offset:
X: 0
Y: 0
Z: 0
Plane: XY
Plane Cell Count: 10
Reference Frame: <Fixed Frame>
Value: true
- Alpha: 1
Autocompute Intensity Bounds: true
Autocompute Value Bounds:
Max Value: 0
Min Value: 0
Value: true
Axis: Z
Channel Name: intensity
Class: rviz/LaserScan
Color: 255; 255; 255
Color Transformer: AxisColor
Decay Time: 0
Enabled: true
Invert Rainbow: false
Max Color: 255; 255; 255
Max Intensity: 4096
Min Color: 0; 0; 0
Min Intensity: 0
Name: RPLidarLaserScan
Position Transformer: XYZ
Queue Size: 1000
Selectable: true
Size (Pixels): 5
Size (m): 0.03
Style: Squares
Topic: /scan
Use Fixed Frame: true
Use rainbow: true
Value: true
- Alpha: 0.7
Class: rviz/Map
Color Scheme: map
Draw Behind: false
Enabled: true
Name: Map
Topic: /map
Value: true
Enabled: true
Global Options:
Background Color: 48; 48; 48
Fixed Frame: map
Frame Rate: 30
Name: root
Tools:
- Class: rviz/MoveCamera
- Class: rviz/Interact
Hide Inactive Objects: true
- Class: rviz/Select
- Class: rviz/SetInitialPose
Topic: /initialpose
- Class: rviz/SetGoal
Topic: /move_base_simple/goal
Value: true
Views:
Current:
Class: rviz/Orbit
Distance: 11.1184
Enable Stereo Rendering:
Stereo Eye Separation: 0.06
Stereo Focal Distance: 1
Swap Stereo Eyes: false
Value: false
Focal Point:
X: -0.0344972
Y: 0.065886
Z: 0.148092
Name: Current View
Near Clip Distance: 0.01
Pitch: 1.5698
Target Frame: <Fixed Frame>
Value: Orbit (rviz)
Yaw: 5.66358
Saved: ~
Window Geometry:
Displays:
collapsed: false
Height: 626
Hide Left Dock: false
Hide Right Dock: false
QMainWindow State: 000000ff00000000fd0000000400000000000001950000022cfc0200000006fb0000001200530065006c0065006300740069006f006e00000001e10000009b0000006400fffffffb0000001e0054006f006f006c002000500072006f0070006500720074006900650073020000019b000001b500000185000000a3fb000000120056006900650077007300200054006f006f02000001df000002110000018500000122fb000000200054006f006f006c002000500072006f0070006500720074006900650073003203000002880000011d000002210000017afb000000100044006900730070006c00610079007301000000280000022c000000dd00fffffffb0000000a0049006d006100670065000000028d000000c60000000000000000000000010000010b00000294fc0200000003fb0000001e0054006f006f006c002000500072006f00700065007200740069006500730100000041000000780000000000000000fb0000000a00560069006500770073000000003300000294000000b000fffffffb0000001200530065006c0065006300740069006f006e010000025a000000b200000000000000000000000200000490000000a9fc0100000001fb0000000a00560069006500770073030000004e00000080000002e10000019700000003000004a00000003efc0100000002fb0000000800540069006d00650000000000000004a0000002f600fffffffb0000000800540069006d00650100000000000004500000000000000000000003240000022c00000004000000040000000800000008fc0000000100000002000000010000000a0054006f006f006c00730100000000ffffffff0000000000000000
Selection:
collapsed: false
Time:
collapsed: false
Tool Properties:
collapsed: false
Views:
collapsed: false
Width: 1215
X: 503
Y: 227
# 编辑view slam launch
cd ~/catkin_ws/src/ros_slam_rplidar/launch/
vim slam_laser.launch
<!-- SLAM with lidar -->
<launch>
<!-- Arguments -->
<arg name="slam_methods" default="hector" doc="slam type [gmapping, hector, karto, cartographer]"/>
<arg name="open_rviz" default="false"/>
<arg name="planner" default="" doc="opt: dwa, teb"/>
<!-- robot with lidar -->
<include file="$(find rplidar_ros)/launch/rplidar.launch" />
<!-- SLAM: Gmapping, Cartographer, Hector, Karto -->
<include file="$(find ros_slam_rplidar)/launch/slam/$(arg slam_methods).launch" />
<!-- move_base -->
<group unless="$(eval planner == '')">
<include file="$(find ros_slam_rplidar)/launch/move_base.launch" unless="$(eval planner == '')">
<arg name="planner" value="$(arg planner)"/>
</include>
</group>
<!-- rviz -->
<group if="$(arg open_rviz)">
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find ros_slam_rplidar)/rviz/slam.rviz" />
</group>
</launch>
# 测试hector slam并通过rviz展示
roslaunch ros_slam_rplidar slam_laser.launch open_rviz:=true示例代码地址:https://github.com/yanjingang/ros_slam_rplidar
手持rplidar雷达大概转了转,构建出的地图:(map topic是hector_mapping发布的地图珊格数据) 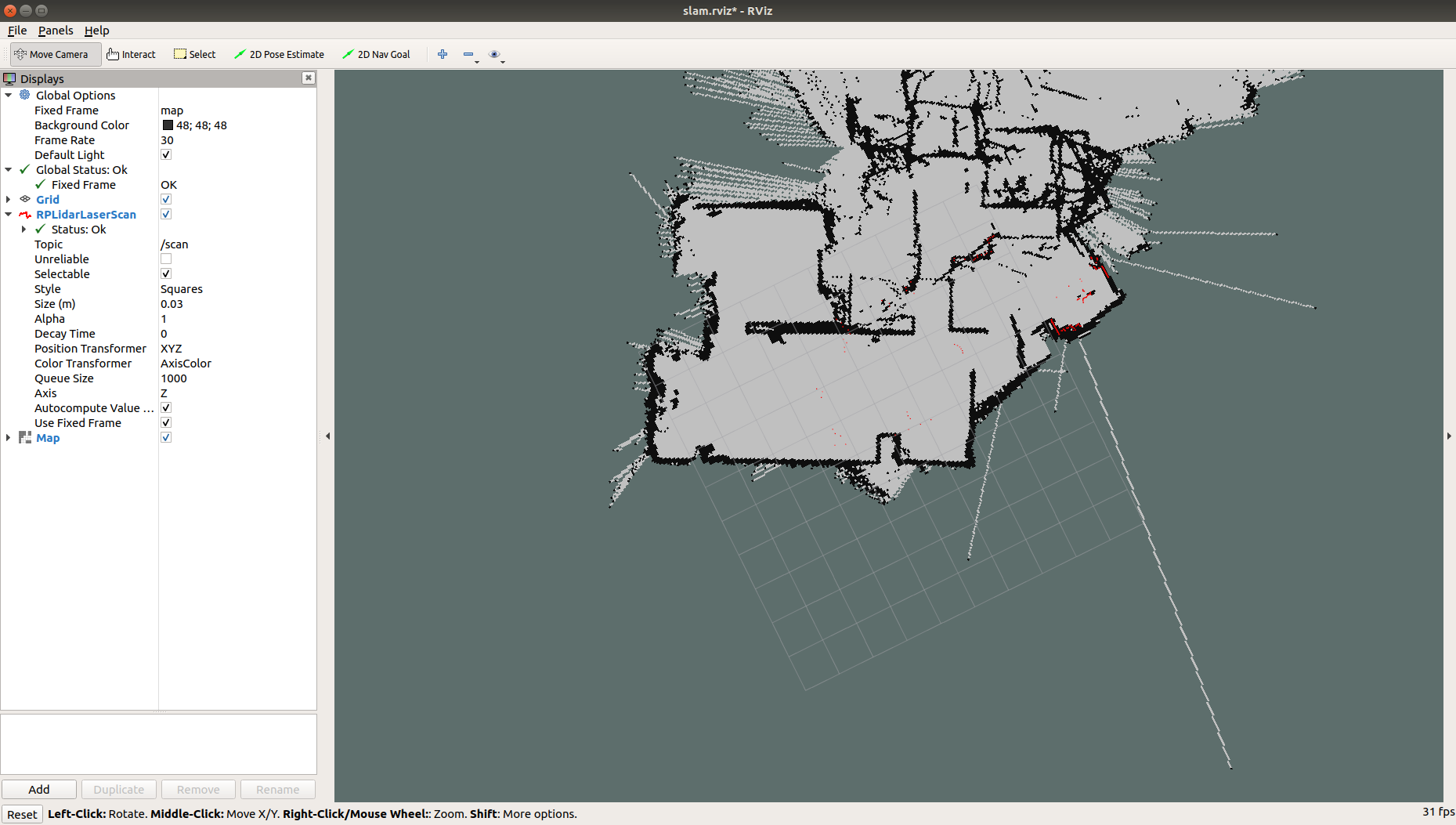
可以看到建出来的地图效果不太好,这里有个原因是我手拿着雷达移动时高度和角度都不稳定,下一步我们把它固定到小车上上再试下。
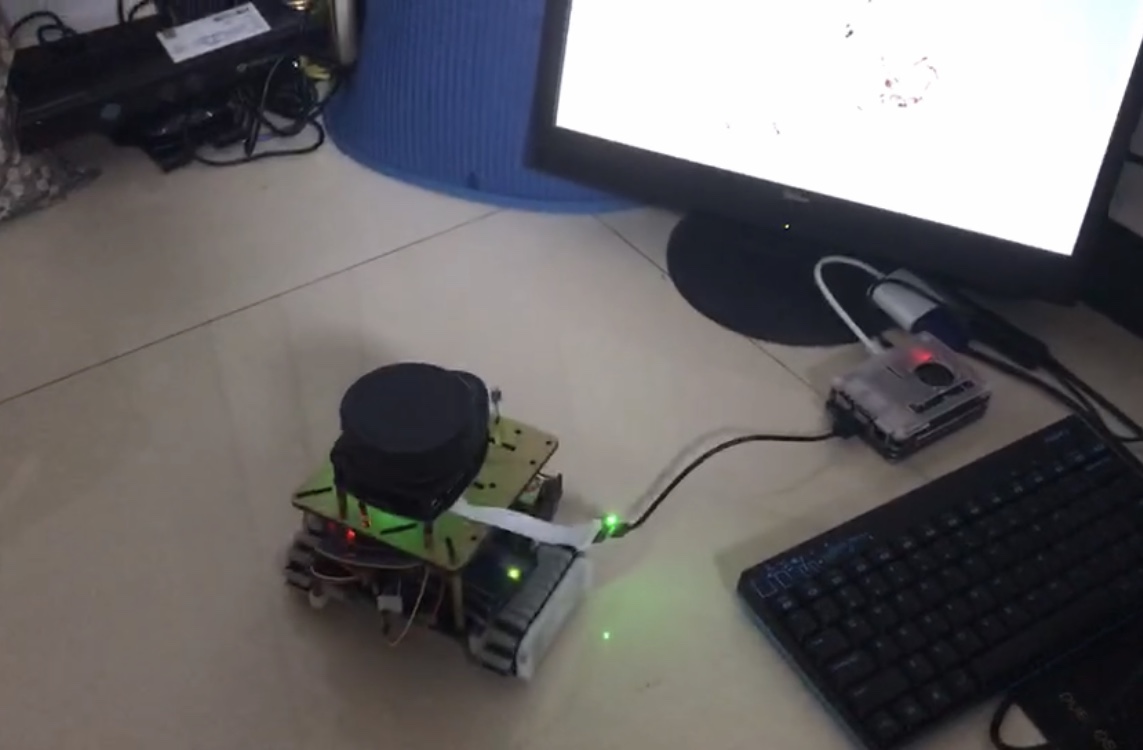
五、坦克小车SLAM建图
1、安装到树莓派
为了方便在小车上使用,我们需要把相关环境安装到树莓派上。
# 安装rplidar、hector、gmapping源码包
cd ~/ros_catkin_ws
rosinstall_generator desktop rosserial rplidar_ros hector_slam gmapping slam_gmapping --rosdistro melodic --deps --wet-only --tar > melodic-desktop-wet.rosinstall
wstool merge -t src melodic-desktop-wet.rosinstall
wstool update -t src
rosdep install -y --from-paths src --ignore-src --rosdistro melodic -r --os=debian:$(lsb_release -cs)
sudo ./src/catkin/bin/catkin_make_isolated --install -DCMAKE_BUILD_TYPE=Release --install-space /opt/ros/melodic
# 测试rplidar
roslaunch rplidar_ros view_rplidar.launch
*注:树莓派USB电流问题:
树莓派USB输出电流是1200mA,rplidar的启动电源电流需要1500mA,所以热插拔会导致系统重启,所以一定先关机再插拔rplidar。
2、构建地图并保存
# 测试slam
roslaunch ros_slam_rplidar slam_laser.launch open_rviz:=true
# 手动保存map
roscd ros_slam_rplidar/maps/
rosrun map_server map_saver -f map建好的局部地图:
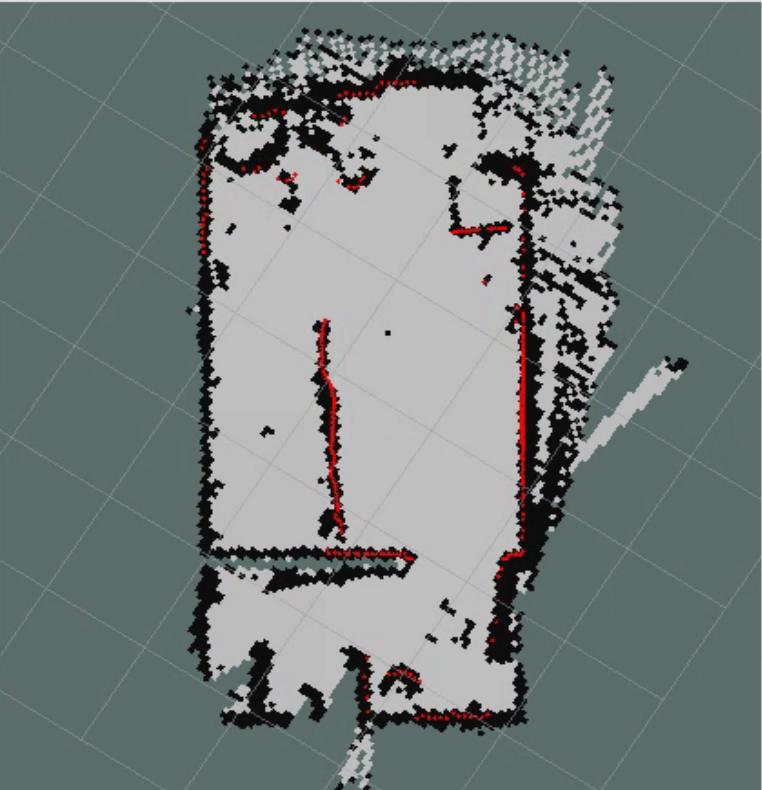
好了,本文就讲到这里,下一篇我们让小车脱离数据线的束缚,构建完整的地图并进行路径规划和避障。
yan 7.12 21:40
