
最近使用摄像头做三维重建和激光雷达联合建图,发现摄像头所还原的三维点云与激光雷达的点云在不少位置存在明显偏差。使用两个点云构建的地图进行导航对比,还是激光雷达的更加精准,此时很有可能是摄像头的标定不精准导致的,本文就主要讲下如何对摄像头进行标定。
最近使用摄像头做三维重建和激光雷达联合建图,发现摄像头所还原的三维点云与激光雷达的点云在不少位置存在明显偏差。使用两个点云构建的地图进行导航对比,还是激光雷达的更加精准,此时很有可能是摄像头的标定不精准导致的,本文就主要讲下如何对摄像头进行标定。

最近换了台服务器,在发布pydp时依赖的人脸识别库dlib总是安装失败,查了下pip安装dlib似乎都会遇到这个问题,这里记录下解决方法。
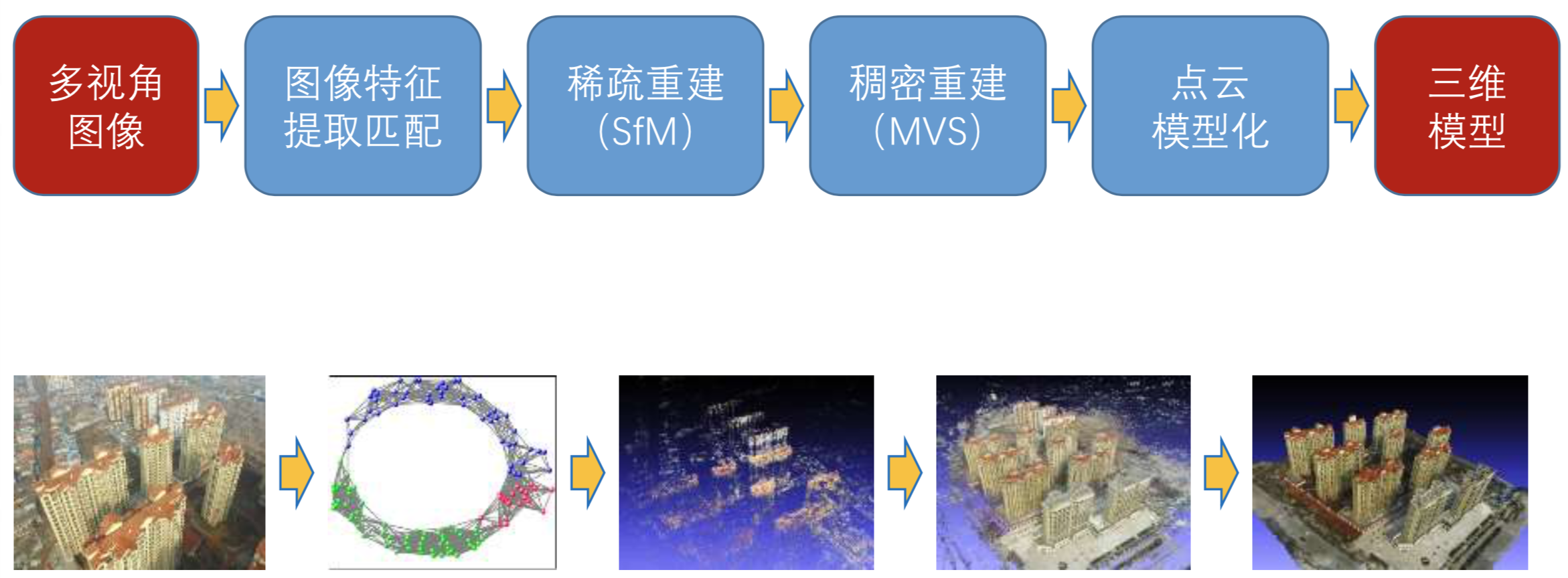
我们知道,照相机的原理是将一个三维场景投影到二维平面。所谓视觉三维重建,顾名思义就是从已有的二维图像中复原原始三维场景。
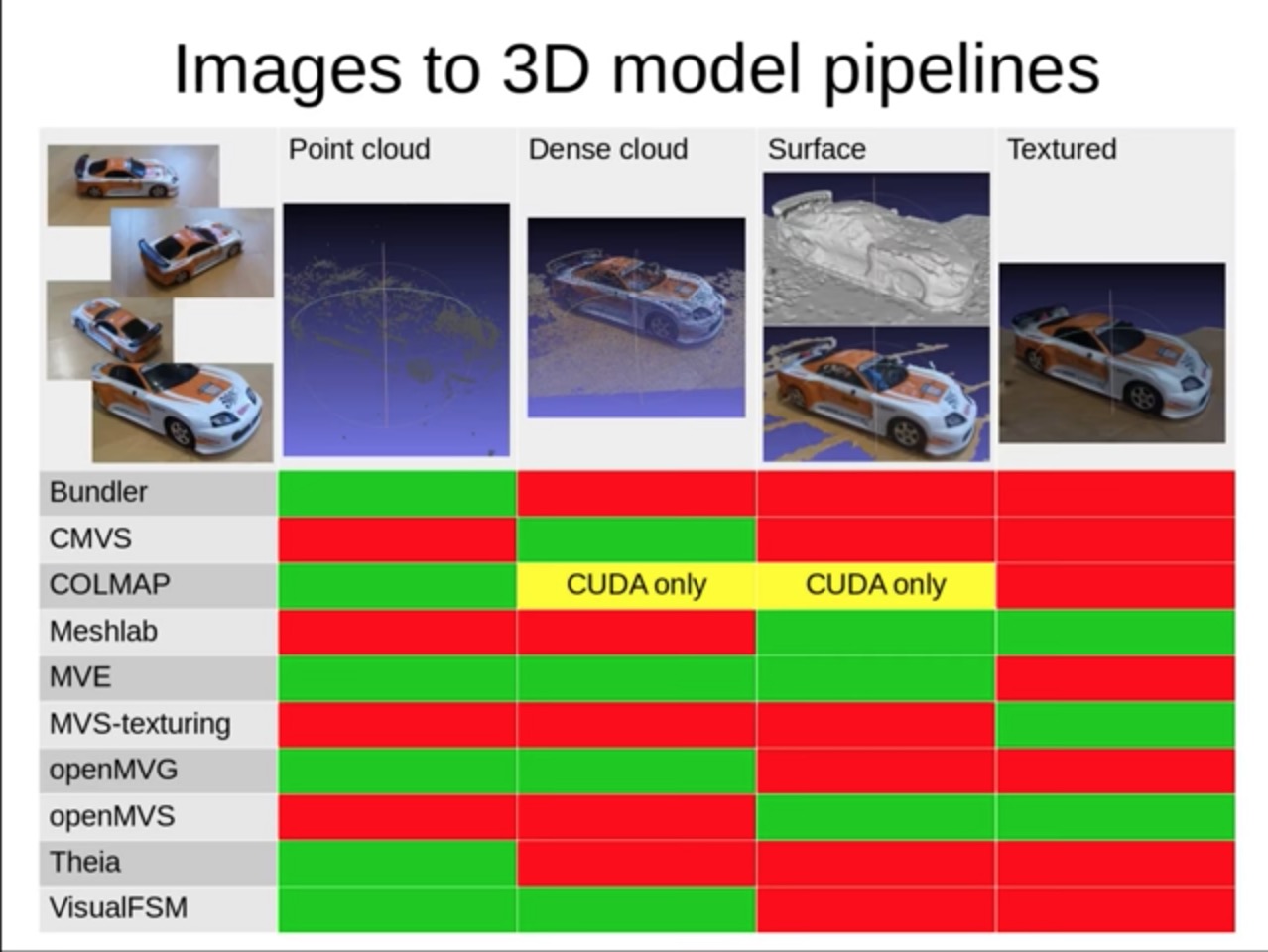
本文简要介绍三维重建的基本流程,列举若干常见系统,给出项目和文档地址,比较它们的工作管线,为深入钻研系统结构作为铺垫。
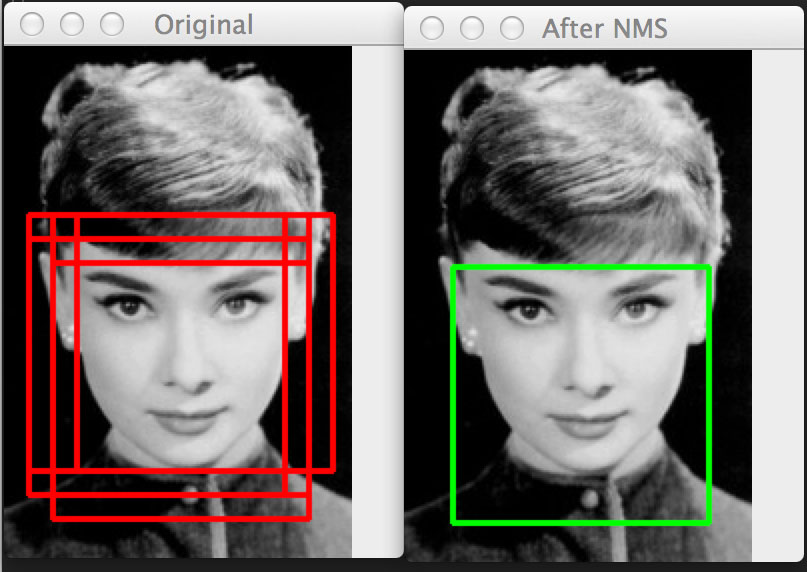
非极大值抑制(Non-Maximum Suppression,NMS),顾名思义就是抑制不是极大值的元素,可以理解为局部最大搜索。通俗点讲就是把图片detect检测出的候选框(即每个框可能都代表某种物体)中互相重叠的部分进行去重,只保留最优的框。
NMS在计算机视觉领域有着非常重要的应用,如视频目标跟踪、数据挖掘、3D重建、目标识别以及纹理分析等。

最近替换视频中的人脸比较火,涉及的技术主要是图像生成,主要采用生成式对抗网络(GAN, Generative Adversarial Networks )深度学习模型。GAN是近年来复杂分布上无监督学习最具前景的方法之一。模型通过框架中(至少)两个模块:生成模型(Generative Model)和判别模型(Discriminative Model)的互相博弈学习产生相当好的输出。
本文基于Deepfakes Faceswap实现了一个简单的图片换脸过程。
一个非常方便的视频<->图片互转工具:视频截帧、帧图片合成视频、添加水印/字幕等。
想给家里的小八爪机器人加上人脸识别功能,比如瞄准的是我时就不能发射炮弹,这样儿子就没法拿这个怪物打我了。。。(也可以在工位上加个摄像头,领导来了提前报警。。。)
在信息论中,两个等长字符串之间的汉明距离是两个字符串对应位置的不同字符的个数。换句话说,它就是将一个字符串变换成另外一个字符串所需要替换的字符个数。 例如:

上个月,Google把“相似图片搜索”正式放上了首页。