概述
非极大值抑制(Non-Maximum Suppression,NMS),顾名思义就是抑制不是极大值的元素,可以理解为局部最大搜索。通俗点讲就是把图片detect检测出的候选框(即每个框可能都代表某种物体)中互相重叠的部分进行去重,只保留最优的框。
NMS在计算机视觉领域有着非常重要的应用,如视频目标跟踪、数据挖掘、3D重建、目标识别以及纹理分析等。
NMS 在目标检测中的应用
人脸检测框重叠例子
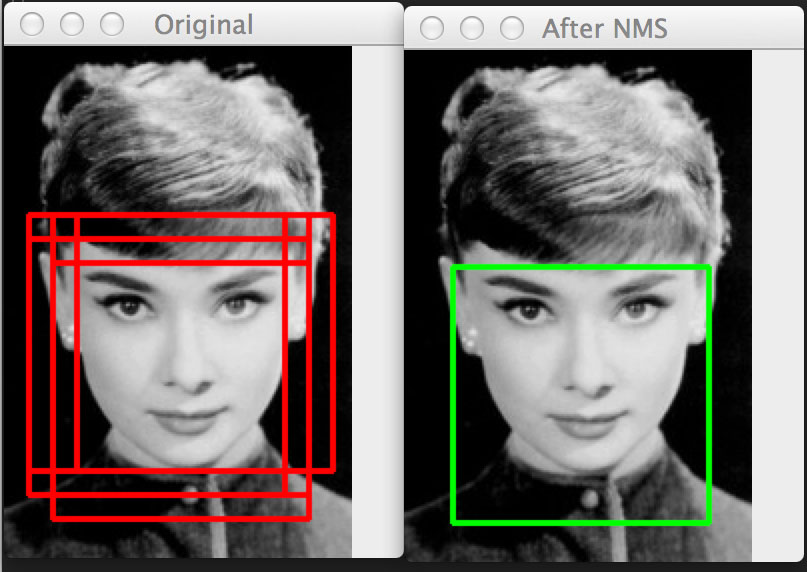
我们的目的就是要去除冗余的检测框,保留最好的一个.
有多种方式可以解决这个问题,Triggs et al. 建议使用Mean-Shift 算法,利用bbox的坐标和当前图片尺度的对数来检测bbox的多种模式.但效果可能并不如使用强分类器结合NMS的效果好.
目标检测 pipline
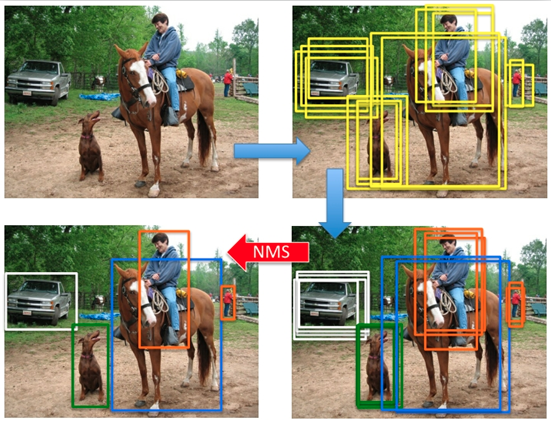
产生proposal后使用分类网络给出每个框的每类置信度,使用回归网络修正位置,最终应用NMS.
NMS 原理
对于Bounding Box的列表B及其对应的置信度S,采用下面的计算方式.选择具有最大score的检测框M,将其从B集合中移除并加入到最终的检测结果D中.通常将B中剩余检测框中与M的IoU大于阈值Nt的框从B中移除.重复这个过程,直到B为空.
重叠率(重叠区域面积比例IOU)阈值
常用的阈值是 0.3 ~ 0.5.
其中用到排序,可以按照右下角的坐标排序或者面积排序,也可以是通过SVM等分类器得到的得分或概率,R-CNN中就是按得分进行的排序.
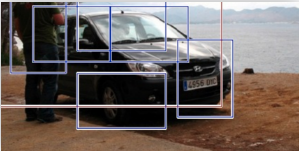
就像上面的图片一样,定位一个车辆,最后算法就找出了一堆的方框,我们需要判别哪些矩形框是没用的。非极大值抑制的方法是:先假设有6个矩形框,根据分类器的类别分类概率做排序,假设从小到大属于车辆的概率 分别为A、B、C、D、E、F。
(1)从最大概率矩形框F开始,分别判断A~E与F的重叠度IOU是否大于某个设定的阈值;
(2)假设B、D与F的重叠度超过阈值,那么就扔掉B、D;并标记第一个矩形框F,是我们保留下来的。
(3)从剩下的矩形框A、C、E中,选择概率最大的E,然后判断E与A、C的重叠度,重叠度大于一定的阈值,那么就扔掉;并标记E是我们保留下来的第二个矩形框。
就这样一直重复,找到所有被保留下来的矩形框。
代码示例
在R-CNN中使用了NMS来确定最终的bbox,其对每个候选框送入分类器,根据分类器的类别分类概率做排序(论文中称为greedy-NMS).但其实也可以在分类之前运用简单版本的NMS来去除一些框.
python实现的单类别nms:py_cpu_nms.py.
def py_cpu_nms(dets, thresh):
"""Pure Python NMS baseline."""
#x1、y1、x2、y2、以及score赋值
x1 = dets[:, 0]
y1 = dets[:, 1]
x2 = dets[:, 2]
y2 = dets[:, 3]
scores = dets[:, 4]
#每一个检测框的面积
areas = (x2 - x1 + 1) * (y2 - y1 + 1)
#按照score置信度降序排序
order = scores.argsort()[::-1]
keep = [] #保留的结果框集合
while order.size > 0:
i = order[0]
keep.append(i) #保留该类剩余box中得分最高的一个
#得到相交区域,左上及右下
xx1 = np.maximum(x1[i], x1[order[1:]])
yy1 = np.maximum(y1[i], y1[order[1:]])
xx2 = np.minimum(x2[i], x2[order[1:]])
yy2 = np.minimum(y2[i], y2[order[1:]])
#计算相交的面积,不重叠时面积为0
w = np.maximum(0.0, xx2 - xx1 + 1)
h = np.maximum(0.0, yy2 - yy1 + 1)
inter = w * h
#计算IoU:重叠面积 /(面积1+面积2-重叠面积)
ovr = inter / (areas[i] + areas[order[1:]] - inter)
#保留IoU小于阈值的box
inds = np.where(ovr <= thresh)[0]
order = order[inds + 1] #因为ovr数组的长度比order数组少一个,所以这里要将所有下标后移一位
return keepFaster R-CNN的MATLAB实现与python版实现一致,代码在这里:nms.m.另外,nms_multiclass.m是多类别nms,加了一层for循环对每类进行nms而已.
NMS loss
值的注意的是对多类别检测任务,如果对每类分别进行NMS,那么当检测结果中包含两个被分到不同类别的目标且其IoU较大时,会得到不可接受的结果。如下图所示:

一种改进方式便是在损失函数中加入一部分NMS损失。NMS损失可以定义为与分类损失相同:????????????????=????????????????(????,????)=−log????????Lnms=Lcls(p,u)=−logpu,即真实列别u对应的log损失,p是C个类别的预测概率。实际相当于增加分类误差。
参考论文《Rotated Region Based CNN for Ship Detection》(IEEE2017会议论文)的Multi-task for NMS部分。
Soft-NMS
上述NMS算法的一个主要问题是当两个ground truth的目标的确重叠度很高时,NMS会将具有较低置信度的框去掉(置信度改成0),参见下图所示.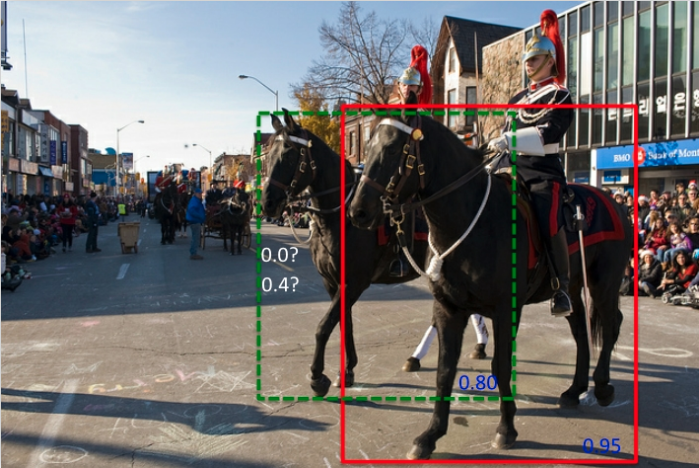
论文:《Improving Object Detection With One Line of Code》
改进之处: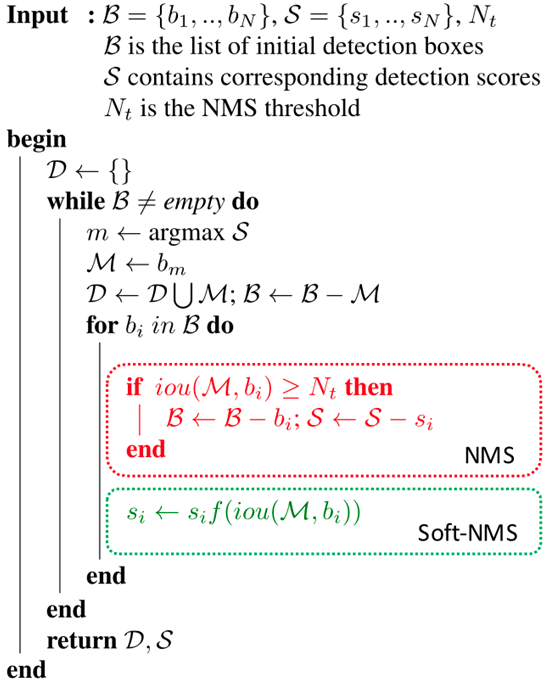
改进方法在于将置信度改为IoU的函数:f(IoU),具有较低的值而不至于从排序列表中删去.
- 线性函数
????????={????????,????????(1−iou(,????????)),iou(,????????)<????????iou(,????????)≥????????si={si,iou(M,bi)<Ntsi(1−iou(M,bi)),iou(M,bi)≥Nt
函数值不连续,在某一点的值发生跳跃.
- 高斯函数
????????=????????????−iou(,????????)2????,∀????????∉si=sie−iou(M,bi)2σ,∀bi∉D
时间复杂度同传统的greedy-NMS,为(????2)O(N2).
ua = float((tx2 - tx1 + 1) * (ty2 - ty1 + 1) + area - iw * ih)
ov = iw * ih / ua #iou between max box and detection box
if method == 1: # linear
if ov > Nt:
weight = 1 - ov
else:
weight = 1
elif method == 2: # gaussian
weight = np.exp(-(ov * ov)/sigma)
else: # original NMS
if ov > Nt:
weight = 0
else:
weight = 1
# re-scoring 修改置信度
boxes[pos, 4] = weight*boxes[pos, 4]Caffe C++ 版实现: makefile/frcnn
效果
| training data | testing data | mAP | mAP@0.5 | mAP@0.75 | mAP@S | mAP@M | mAP@L | Recall | |
|---|---|---|---|---|---|---|---|---|---|
| Baseline D-R-FCN | coco trainval | coco test-dev | 35.7 | 56.8 | 38.3 | 15.2 | 38.8 | 51.5 | |
| D-R-FCN, ResNet-v1-101, NMS | coco trainval | coco test-dev | 37.4 | 59.6 | 40.2 | 17.8 | 40.6 | 51.4 | 48.3 |
| D-R-FCN, ResNet-v1-101, SNMS | coco trainval | coco test-dev | 38.4 | 60.1 | 41.6 | 18.5 | 41.6 | 52.5 | 53.8 |
| D-R-FCN, ResNet-v1-101, MST, NMS | coco trainval | coco test-dev | 39.8 | 62.4 | 43.3 | 22.6 | 42.3 | 52.2 | 52.9 |
| D-R-FCN, ResNet-v1-101, MST, SNMS | coco trainval | coco test-dev | 40.9 | 62.8 | 45.0 | 23.3 | 43.6 | 53.3 | 60.4 |
在基于proposal方法的模型结果上应用比较好,检测效果提升:

在R-FCN以及Faster-RCNN模型中的测试阶段运用Soft-NMS,在MS-COCO数据集上mAP@[0.5:0.95]能够获得大约1%的提升(详见这里). 如果应用到训练阶段的proposal选取过程理论上也能获得提升. 在自己的实验中发现确实对易重叠的目标类型有提高(目标不一定真的有像素上的重叠,切斜的目标的矩形边框会有较大的重叠).
而在SSD,YOLO等非proposal方法中没有提升.
其它应用
边缘检测:Canny算子中的非极大值抑制是沿着梯度方向进行的,即是否为梯度方向上的极值点;(参考这里)
特征点检测:在角点检测等场景下说的非极大值抑制,则是检测中心点处的值是否是某一个邻域内的最大值.
