一直听到ROS这个名字,很好奇它为什么在机器人领域这么出名,所以从今天起我将从零开始学习一下,看看它到底有哪些神奇之处。本文作为初探篇会先带大家了解ROS的基本概念,通过安装和创建/运行程序包了解Nodes节点、Topics/Msg、Service服务/参数服务器、几个常见的工具。
ROS (Robot Operating System, 机器人操作系统) 提供一系列程序库和工具以帮助软件开发者创建机器人应用软件。它提供了硬件抽象、设备驱动、库函数、可视化、消息传递和软件包管理等诸多功能。ROS遵守BSD开源许可协议。
ROS的官网:https://ros.org/
ROS 图(graph)概念:
-
Nodes:节点,一个节点即为一个可执行文件,它可以通过ROS与其它节点进行通信。
-
Messages:消息,消息是一种ROS数据类型,用于订阅或发布到一个话题。
-
Topics:话题,节点可以发布消息到话题,也可以订阅话题以接收消息。
-
Master:节点管理器,ROS名称服务 (比如帮助节点找到彼此)。
-
rosout: ROS中相当于stdout/stderr。
-
roscore: 主机+ rosout + 参数服务器 (参数服务器会在后面介绍)。
一、安装
今天刚攒了一台Ubuntu18.04机器,就用这台机器来安装ROS吧。
目前支持Ubuntu18.04的最新ROS发行版是Melodic Morenia,参考Ubuntu install of ROS Melodic安装即可。
# 配置 Ubuntu软件更新 允许 "restricted"、"universe" 和 "multiverse"这三种安装模式
# LANG
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8
# 添加 sources.list
#sudo sh -c 'echo "deb [arch=$(dpkg --print-architecture)] http://packages.ros.org/ros/ubuntu $(lsb_release -cs) main" > /etc/apt/sources.list.d/ros-latest.list'
sudo sh -c '. /etc/lsb-release && echo "deb [arch=$(dpkg --print-architecture)] http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
# 添加公钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
# or curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -
# 安装
sudo apt update
sudo apt install ros-melodic-desktop-full #桌面完整版ros-melodic-desktop-full;桌面版ros-melodic-desktop;基础版ros-melodic-ros-base
# 设置环境
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
# 安装工具
sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential
# 或 pip install --user catkin_pkg rosdep rosinstall-generator wstool six vcstools pydot
sudo apt install python-rosdep
# 初始化 rosdep
sudo vim /etc/hosts
185.199.109.133 raw.githubusercontent.com
sudo rosdep init
rosdep update # timeout问题解决方法:https://www.guyuehome.com/33258
printenv | grep ROS
二、创建/编译程序包
参考:Installing and Configuring Your ROS Environment、Navigating the ROS Filesystem、Creating a ROS Package
# 创建工作空间
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/
catkin_make -DPYTHON_EXECUTABLE=/usr/bin/python3
echo "source /home/work/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
echo $ROS_PACKAGE_PATH
# 文件系统工具
sudo apt-get install ros-melodic-ros-tutorials libfwup1 python3-rosdistro-modules python3-rospkg-modules
rospack find roscpp
roscd roscpp
echo $ROS_PACKAGE_PATH
roscd roscpp/cmake
roscd log
rosls roscpp_tutorials
roscd roscpp_tutorials/
# 创建ROS程序包
cd ~/catkin_ws/src
# catkin_create_pkg <package_name> [depend1] [depend2] [depend3]
catkin_create_pkg beginner_tutorials std_msgs rospy roscpp
cd ~/catkin_ws
catkin_make
# 查看程序包的一级依赖
rospack depends1 beginner_tutorials
roscd beginner_tutorials
cat package.xml
# 查看间接依赖
rospack depends1 rospy
rospack depends beginner_tutorials
# 自定义ROS程序包
vim ~/catkin_ws/src/beginner_tutorials/package.xml
<description>Mars test package: beginner_tutorials</description>
<maintainer email="yanjingang@mail.com">yanjingang</maintainer>
<license>BSD</license>
cd ~/catkin_ws
catkin_make
三、理解ROS Nodes节点
一个节点其实只不过是ROS程序包中的一个可执行文件。ROS节点可以使用ROS客户库与其他节点通信。节点可以发布或接收一个话题,也可以提供或使用某种服务。
ROS客户端库允许使用不同编程语言编写的节点之间互相通信:
- rospy = python 客户端库
- roscpp = c++ 客户端库
# 启动roscore server
roscore # ros+core : master (provides name service for ROS) + rosout (stdout/stderr) + parameter server (parameter server will be introduced later)
# 显示当前运行的ROS节点信息
rosnode list #ros+node : ROS tool to get information about a node.
/rosout #看到这个表示当前只有一个节点在运行: rosout。因为这个roscore内置节点用于收集和记录节点调试输出信息,所以它总是在运行的
# 查看指定节点信息
rosnode info /rosout
# 运行指定节点
# rosrun [package_name] [node_name] #ros+run : runs a node from a given package.
rosrun turtlesim turtlesim_node #这里打开一个内置的小龟模拟器

# 此时可以看到多了一个turtlesim节点
rosnode list
/rosout
/turtlesim
# 使用__name自定义节点名
rosrun turtlesim turtlesim_node __name:=mars_turtlesim
# ping节点测试
rosnode ping /mars_turtlesim
rosnode: node is [/mars_turtlesim]
pinging /mars_turtlesim with a timeout of 3.0s
xmlrpc reply from http://mars:36119/ time=0.364065ms
xmlrpc reply from http://mars:36119/ time=1.200914ms三、理解ROS Topics话题
# 分别启动roscore、turtlesim
roscore
rosrun turtlesim turtlesim_node
# 启动turtlesim键盘远程控制节点
rosrun turtlesim turtle_teleop_key #注:必须在当前命令窗口按键才会被程序监听到
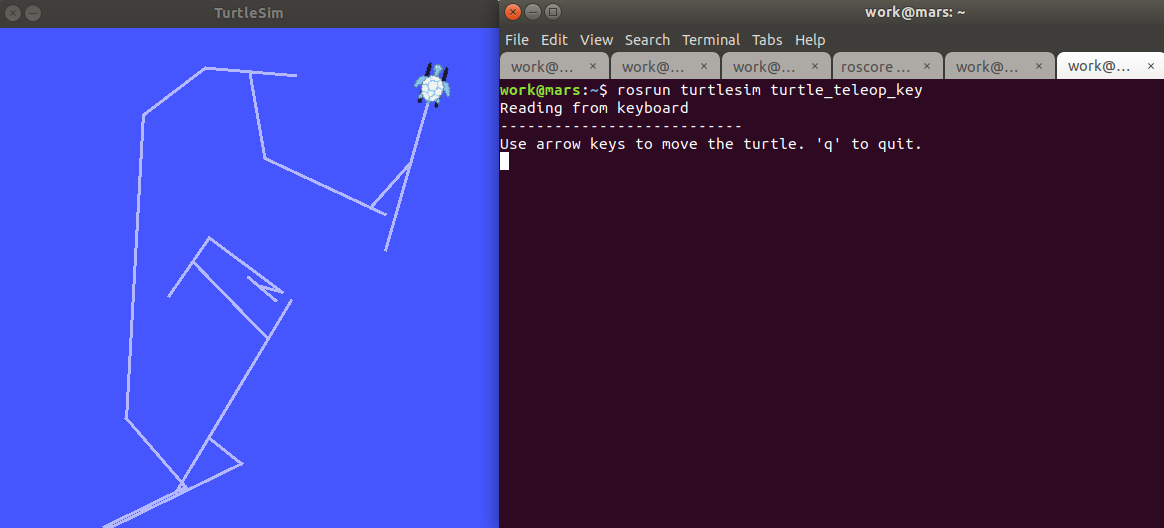
turtlesim_node节点和turtle_teleop_key节点之间是通过一个ROS话题来互相通信的。turtle_teleop_key在一个话题上发布按键输入消息,而turtlesim则订阅该话题以接收该消息。下面让我们使用rqt_graph来显示当前运行的节点和话题。
# 安装rqt_graph(rqt能够创建一个显示当前系统运行情况的动态关系图)
sudo apt install ros-melodic-rqt ros-melodic-rqt-common-plugins
# 启动rqt_graph节点
rosrun rqt_graph rqt_graph #这里可以看到当前turtle_teleop_key控制turtlesim的topic名称叫/turtle1/cmd_vel
# 监听topic传输的数据
rostopic echo /turtle1/cmd_vel #刷新rqt_graph界面可以看到新的topic监听链路
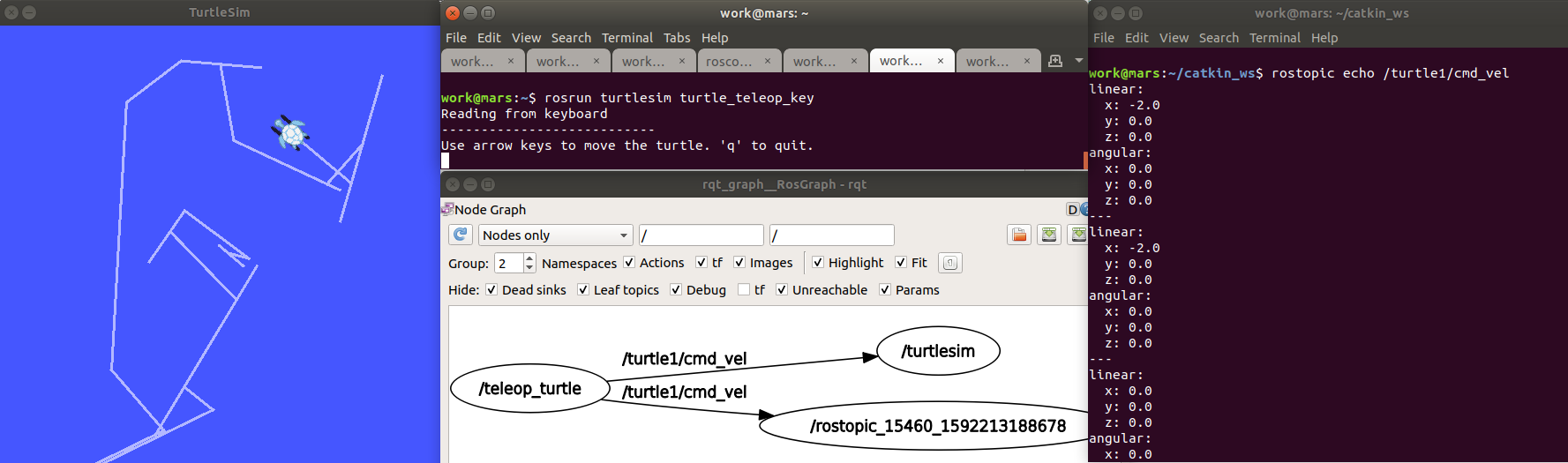
从上图可以看到,turtle_teleop_key向名叫/turtle1/cmd_vel的topic发送消息,左侧的turtlesim模拟器和右侧的rostopic echo指令监听了这个topic并执行对应的动画或数据打印操作。
# 查看当前运行中的topic情况
rostopic list -v
Published topics:
* /turtle1/color_sensor [turtlesim/Color] 1 publisher
* /turtle1/cmd_vel [geometry_msgs/Twist] 1 publisher
* /rosout [rosgraph_msgs/Log] 4 publishers
* /rosout_agg [rosgraph_msgs/Log] 1 publisher
* /turtle1/pose [turtlesim/Pose] 1 publisher
Subscribed topics:
* /turtle1/cmd_vel [geometry_msgs/Twist] 2 subscribers
* /rosout [rosgraph_msgs/Log] 1 subscriber
* /statistics [rosgraph_msgs/TopicStatistics] 1 subscriber
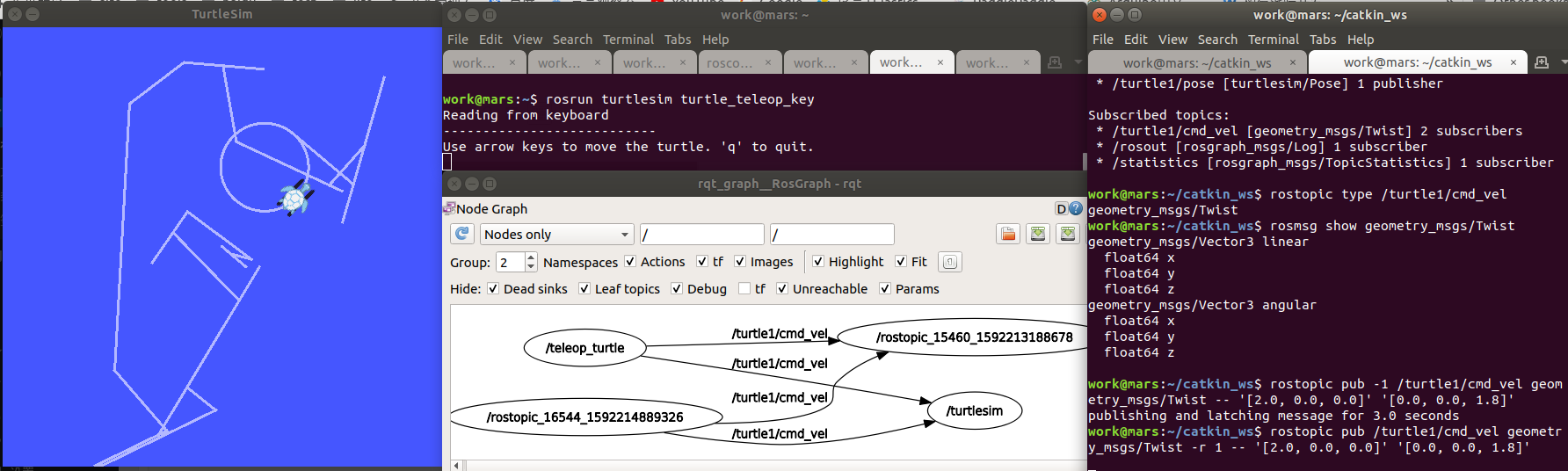
# 查看topic的MessageType
rostopic type /turtle1/cmd_vel
geometry_msgs/Twist
# 查看MessageType结构定义
rosmsg show geometry_msgs/Twist
geometry_msgs/Vector3 linear
float64 x
float64 y
float64 z
geometry_msgs/Vector3 angular
float64 x
float64 y
float64 z
# 模拟向topic发送message
# rostopic pub [topic] [msg_type] [args]
rostopic pub -1 /turtle1/cmd_vel geometry_msgs/Twist -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, 1.8]' #以2.0大小的线速度和1.8大小的角速度开始移动(-1表示发布一条消息后马上退出;--表示后边的都是数据)
rostopic pub /turtle1/cmd_vel geometry_msgs/Twist -r 1 -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, 1.8]' #-r 1参数:以1Hz的频率发布命令到topic
rostopic hz /turtle1/cmd_vel #查看topic消息pub频率
可以看到左侧的小龟一直转圈,中间rqt_graph上多了一个pub节点向turtlesim和rostopic echo监听pub数据。
四、理解ROS Service服务/参数服务器
参考:Understanding ROS Services and Parameters
服务(services)是节点之间通讯的另一种方式。服务允许节点发送请求(request) 并获得一个响应(response)。
# 常用命令
rosservice list 输出可用服务的信息
rosservice call 调用带参数的服务
rosservice type 输出服务类型
rosservice find 依据类型寻找服务find services by service type
rosservice uri 输出服务的ROSRPC uri
# 查看可用服务
rosservice list
/clear #清除
/kill #终止
/reset #重置
/spawn #再生
/rosout/get_loggers
/rosout/set_logger_level
/rostopic_15460_1592213188678/get_loggers
/rostopic_15460_1592213188678/set_logger_level
/rqt_gui_py_node_15282/get_loggers
/rqt_gui_py_node_15282/set_logger_level
/teleop_turtle/get_loggers
/teleop_turtle/set_logger_level
/turtle1/set_pen
/turtle1/teleport_absolute
/turtle1/teleport_relative
/turtlesim/get_loggers
/turtlesim/set_logger_level
# 查看clear服务类型(参数/返回值)
rosservice type clear
std_srvs/Empty #Empty:请求不需要发送数据,响应也没有数据
# 使用clear清空模拟器画面
rosservice call clear #此时turtlesim上的轨迹会清除,只剩下小龟
# 查看spawn服务类型(参数/返回值)
rosservice type spawn| rossrv show
float32 x
float32 y
float32 theta
string name
---
string name
# 使用spawn在给定的位置和角度生成一只新的乌龟
rosservice call spawn 2 2 0.2 ""
name: "turtle2"
rosservice call spawn 2 8 0.1 ""
name: "turtle3"
rosservice call spawn 7 6 0.3 ""
name: "turtle4"

ROS 参数服务器(Parameter Server)上的数据可以通过rosparam操作存储。参数服务器能够存储整型、浮点、布尔、字符串、字典和列表等数据类型。rosparam使用YAML标记语言的语法。一般而言,YAML的表述很自然:1 是整型, 1.0 是浮点型, one是字符串, true是布尔, [1, 2, 3]是整型列表, {a: b, c: d}是字典. rosparam有很多指令可以用来操作参数,如下所示:
# 常用命令
rosparam set 设置参数
rosparam get 获取参数
rosparam load 从文件读取参数
rosparam dump 向文件中写入参数
rosparam delete 删除参数
rosparam list 列出参数名
# 查看当前参数服务器上有哪些参数
rosparam list
/mars_turtlesim/background_b
/mars_turtlesim/background_g
/mars_turtlesim/background_r
/rosdistro
/roslaunch/uris/host_localhost__36533
/rosversion
/run_id
/turtlesim/background_b
/turtlesim/background_g
/turtlesim/background_r
# 获取参数
rosparam get /turtlesim/background_r #获取指定参数
70
rosparam get / #获取所有参数
background_r: 150
roslaunch:
uris: {host_localhost__36533: 'http://localhost:36533/'}
rosversion: '1.14.6
......
# 修改参数
rosparam set /turtlesim/background_r 150
rosservice call clear
# 导出所有参数到文件
rosparam dump params.yaml
# 加载导出的参数配置
rosparam load params.yaml

五、工具
参考:Using rqt_console and roslaunch、Using rosed to edit files in ROS、Getting started with roswtf
# launch启动器 (可以用来启动定义在launch文件中的多个节点)
roscd beginner_tutorials
mkdir launch
cd launch
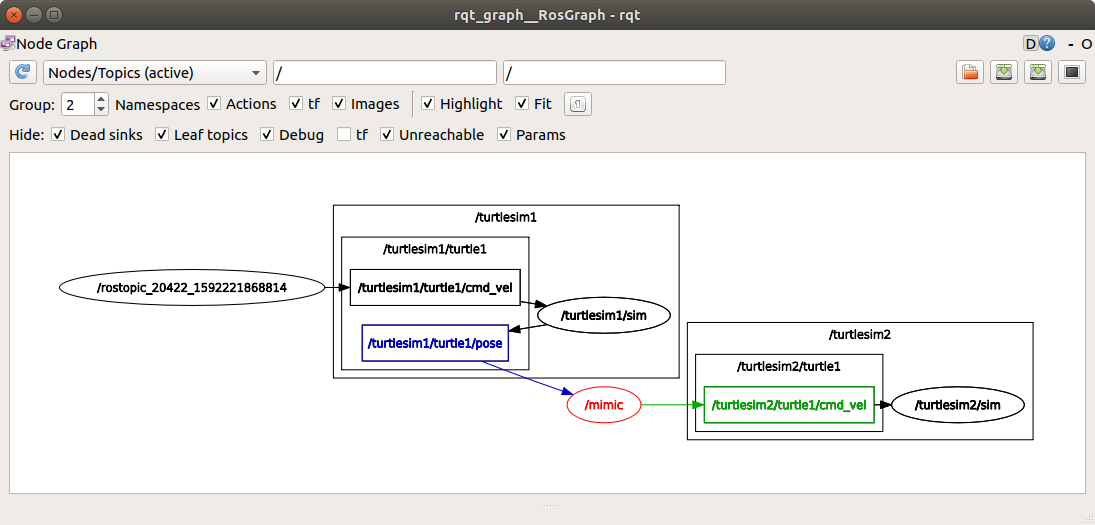
vim turtlemimic.launch (group:节点分组;ns:命名空间namespace;mimic:模仿节点,让turtlesim2模仿turtlesim1)
<launch>
<group ns="turtlesim1">
<node pkg="turtlesim" name="sim" type="turtlesim_node"/>
</group>
<group ns="turtlesim2">
<node pkg="turtlesim" name="sim" type="turtlesim_node"/>
</group>
<node pkg="turtlesim" name="mimic" type="mimic">
<remap from="input" to="turtlesim1/turtle1"/>
<remap from="output" to="turtlesim2/turtle1"/>
</node>
</launch>
# 启动
roslaunch beginner_tutorials turtlemimic.launch #可以看到同时起了两个小龟模拟器
# 查看小龟模拟器的topic
rostopic list |grep turtlesim1
/turtlesim1/turtle1/cmd_vel
/turtlesim1/turtle1/color_sensor
/turtlesim1/turtle1/pose
# 向topic发送指令 (可以看到turtlesim2在模仿turtlesim1一起转圈)
rostopic pub /turtlesim1/turtle1/cmd_vel geometry_msgs/Twist -r 1 -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, 1.8]' #-r 1参数:以1Hz的频率发布命令到topic
# 是使用rqt可以看到他们之间的数据流关系
rosrun rqt_graph rqt_graph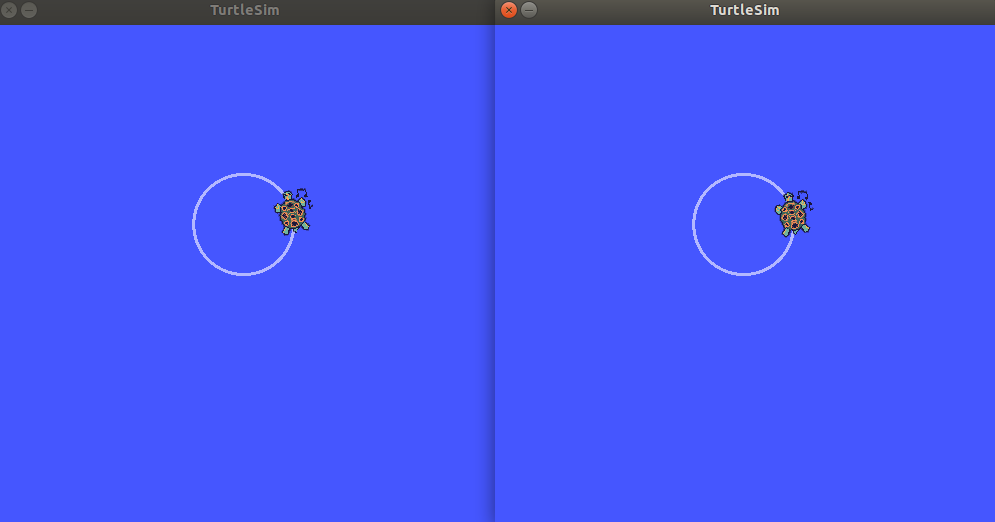
# log查看器
rosrun rqt_logger_level rqt_logger_level #如果日志等级都改成DEBUG后卡死了,可以重启ros节点日志等级会自动重置
rosrun rqt_console rqt_console
# rosed快捷编辑
# rosed [package_name] [filename] #直接通过package名vim编辑文件而无需指定文件路径
rosed beginner_tutorials package.xml
# roswtf错误排查
ps -ef | grep -i rosmaster #确认roscore运行
roscd rosmaster
roswtf #检查系统错误
Loaded plugin tf.tfwtf
Package: rosmaster
================================================================================
Static checks summary:
No errors or warnings
================================================================================
Beginning tests of your ROS graph. These may take a while...
analyzing graph...
... done analyzing graph
running graph rules...
... done running graph rules
Online checks summary:
Found 1 warning(s).
Warnings are things that may be just fine, but are sometimes at fault
WARNING The following node subscriptions are unconnected:
* /turtlesim:
* /turtle1/cmd_vel
今天我们学习了ROS的基本概念,安装并通过创建和运行程序包了解了Nodes节点、Topics/Msg、Service服务/参数服务器以及几个常见的工具,下一篇将讲解如何自己创建Message消息、ROS服务及Client、仿真回放,以及在机器人项目中的应用。
yan 20.6.14 23:50
参考:
Ubuntu install GIMP and plugns
