
一、概述
一个人在乘船渡河的时候,前面有一只船正要撞过来。这个人喊了好几声,但是前面的船没有回应。见状这个人十分生气,开始破口大骂前方船上的人。后来他发现撞上来的竟然是一艘空船,于是刚刚怒气冲冲的人怒火一下就消失的无影无踪了。
一个人在乘船渡河的时候,前面有一只船正要撞过来。这个人喊了好几声,但是前面的船没有回应。见状这个人十分生气,开始破口大骂前方船上的人。后来他发现撞上来的竟然是一艘空船,于是刚刚怒气冲冲的人怒火一下就消失的无影无踪了。
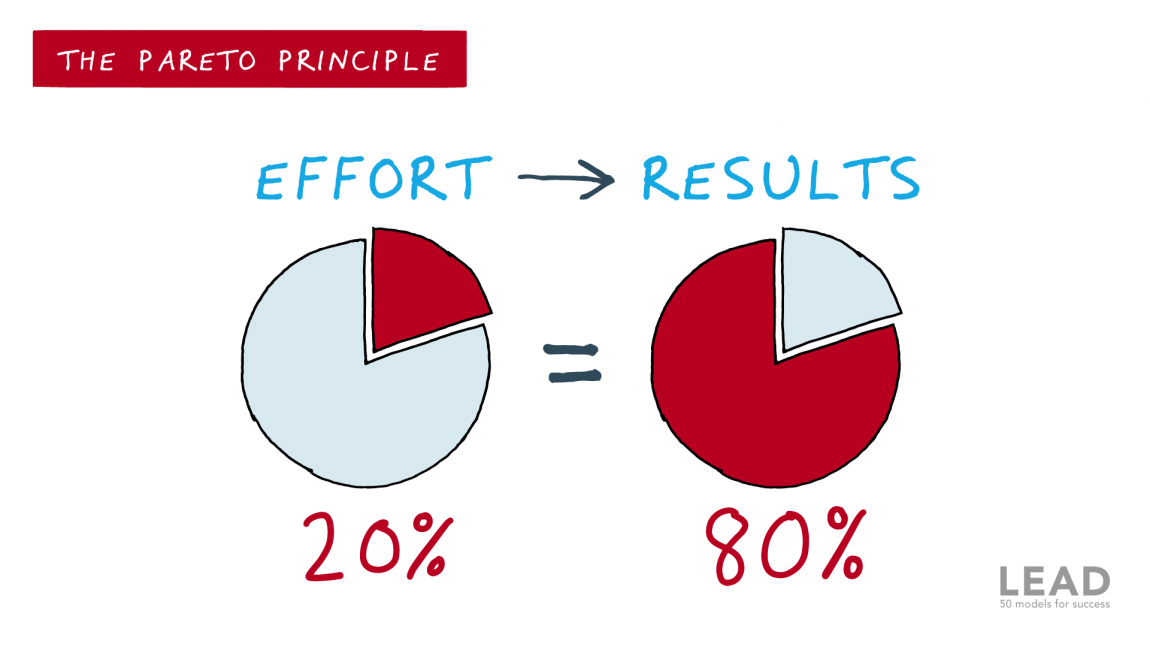
二八定律,又称帕累托法则,是由19世纪末20世纪初的意大利经济学家帕累托提出的。

本文主要记录华硕的GPU本(RTX2070)如何Ubuntu20.04 + Nvidia显卡驱动 + CUDA11.8 + cuDNN8.7,并验证GPU CUDA生效的过程。
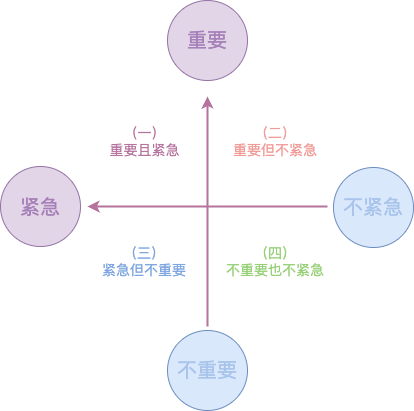
有时看到别人或自己在安排和处理事情上陷入混乱时,我脑海里都忍不住想到系统调度算法,一直想写一下调度算法对我们日常处理事情的启发,今天终于动笔,本文就结合操作系统调度算法,以日常生活做事安排为例,看看是否有值的借鉴的地方。

五一假期陪娃到外地参赛,比赛期间闲来无事,拜读了唐浩明版的《曾国藩》。以前喜欢读资治通鉴、史记,学到不少知识,但这本《曾国藩》并不是正史,而是一本小说,里边结合了曾家流传下来的曾国藩家书、手记等,增加了一些虚构的成分,但总体来说写的不错,把那个年代中一代重臣跌宕起伏的官场生涯描绘的栩栩如生。

文明的进步,就是人们在不假思索中可以做的事情越来越多。——阿尔弗雷德·诺思·怀特黑德
人类在长期的进化过程中,为了不断提高效率,逐渐形成了不少条件反射的思维/行为模式,它能帮我们节省思考的时间和精力。通过经验习得的心理原则和范式,使我们根据少数关键特征对自动反应分类,一碰到这样那样的触发特征,就不假思索的做出反应。
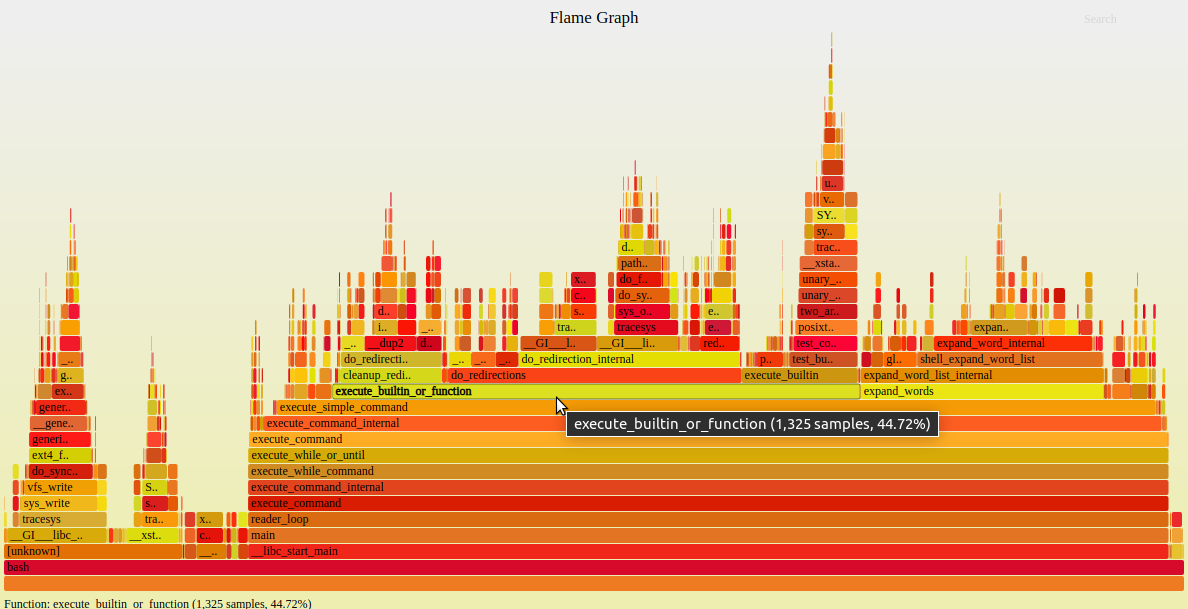
软件的性能分析,往往需要查看 CPU 耗时,了解瓶颈在哪里。perf和火焰图是性能分析的利器。本文主要介绍它们的基本用法。
有一个故事一直想分享给大家:
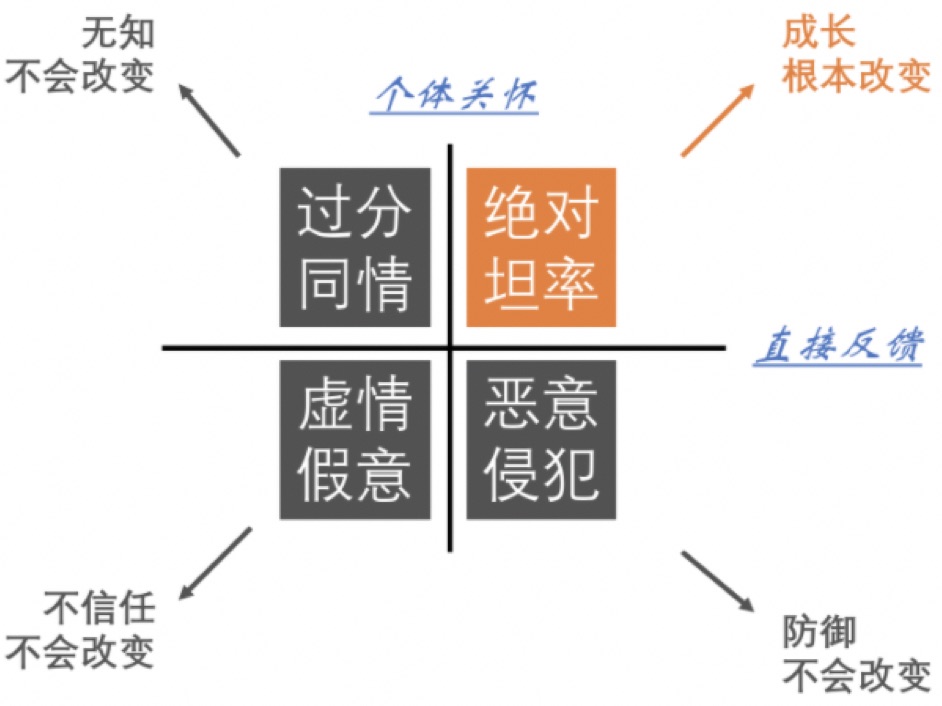
这个课程主要指出绩效评价和绩效沟通中需要注意的关键点,绩效是日常管理的检验,不只是对员工产出的考核,也是对管理者领导力的考核。其中比较有感触的点:

这个课程主要是为了提醒管理者,作为生产经营的参与方,应具备经营者意识、全局最优资源分配意识,应破除领地意识,树立阵地意识,使公司资产得到更高效的配置,从而产生更大的价值。
最近这两年感觉自己总是忙的晕头转向,工作、生活、健康、学习难以平衡,最后感觉哪方面都没做好,直到我看了一本书《精要主义》,读后根据书中的方法进行实践,发现生活确实美好了很多,虽然因此失去了一些东西,但也因此得到了一些更宝贵的东西。

我们完成SLAM建图后,如何在导航时让自己的底盘正常工作,是很多新手面临的问题。上位机大家通常采用pi或nvidia jetson nano甚至更强算力的板子,系统一般采用ubuntu,这使得上位机的库几乎是通用的;而底盘不同,单片机有stm32、arduino、51等,电机的种类就更多了,电机的精准度和质量参差不齐,容易在底盘动起来后难以实现精准控制。如何利用电机编码器进行精准的底盘移动并上报odom,不少人会在这里花费大量时间,本文将针对此类问题进行具体讲解。
近期交付项目较多,团队同学出差客户现场或远程与客户直接接触的越来越多,出现一些问题,这里统一梳理明确下与客户相关的注意事项。
团队方向和人数越来越多,各类晨会/周会很容易冗长发散,同时有的会部分关键人员不上会,造成会议耗时过长、效率底下。针对这类问题,特明确晨会/周会要点。