
我们在使用SLAM建图后,为了提高显示及运行效果,通常需要对地图进行一些调整,比如点云毛刺清理、增加未知区域的边界防护等。本文主要讲解下如何对2D .gpm地图文件进行编辑修改的方法。
我们在使用SLAM建图后,为了提高显示及运行效果,通常需要对地图进行一些调整,比如点云毛刺清理、增加未知区域的边界防护等。本文主要讲解下如何对2D .gpm地图文件进行编辑修改的方法。
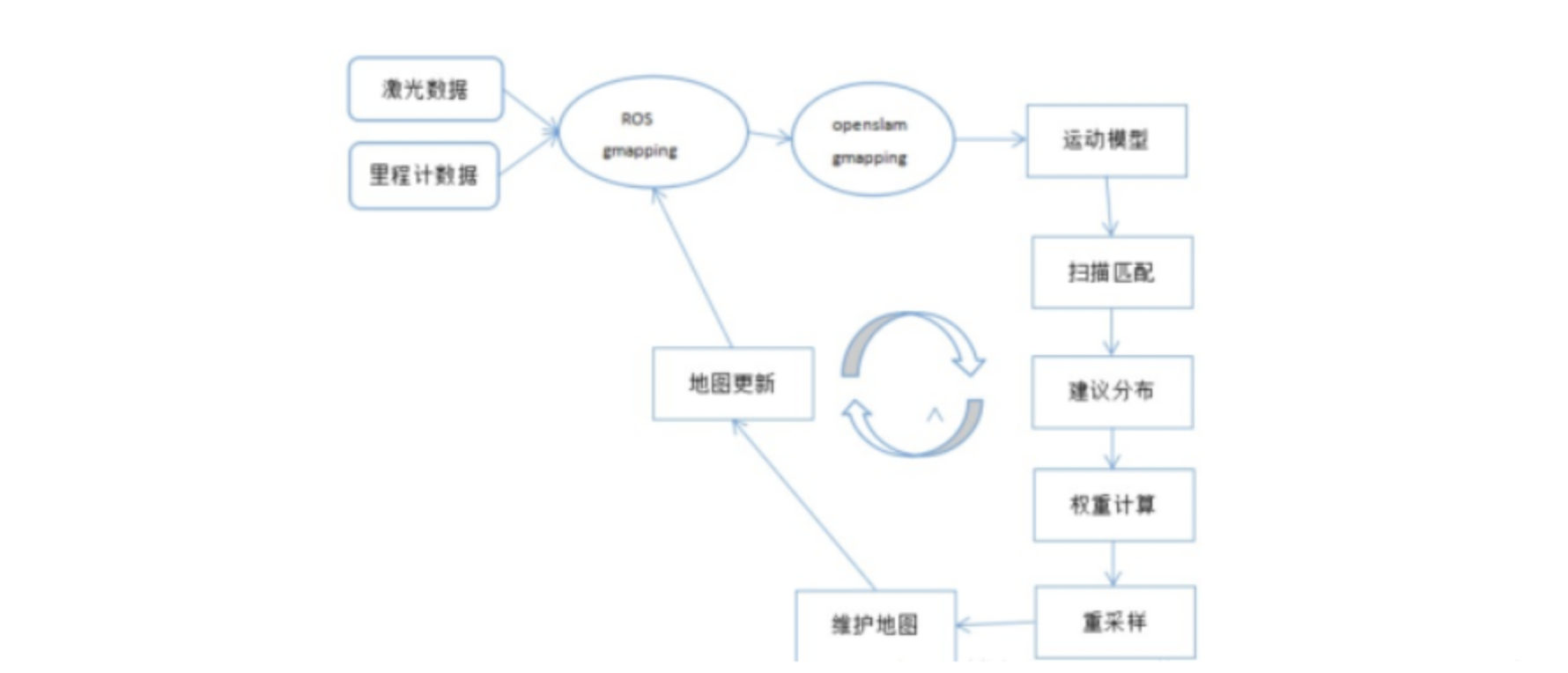
本文主要针对常见的2D建图算法Gmapping、Hector、Karto、Cartographer进行对比,以确定在室内小场景、室外大场景下使用哪种建图算法更为合适。
最近看了一本马伯庸的书《长安的荔枝》,感觉很好玩,表面上是在讲一个唐朝底层荔枝使李善德负责从广东岭南运载新鲜荔枝到长安的故事,实际讲的是一个坎坷的项目负责人如何在资源匮乏、希望渺茫的情况下推进项目达成的过程。

一个人在乘船渡河的时候,前面有一只船正要撞过来。这个人喊了好几声,但是前面的船没有回应。见状这个人十分生气,开始破口大骂前方船上的人。后来他发现撞上来的竟然是一艘空船,于是刚刚怒气冲冲的人怒火一下就消失的无影无踪了。
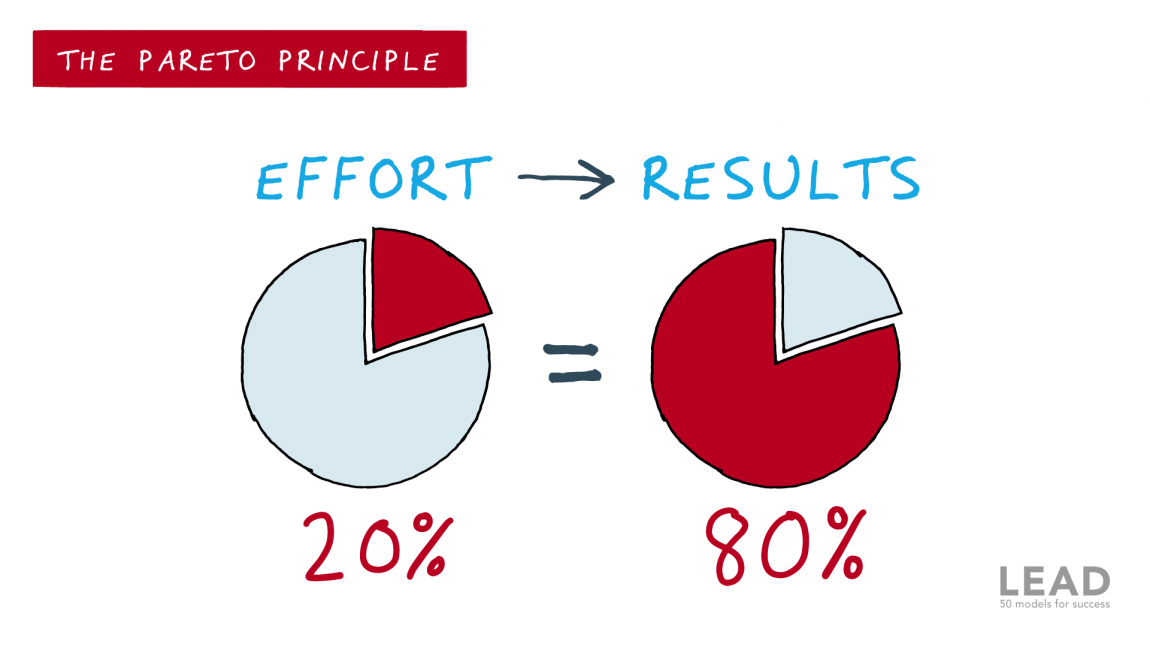
二八定律,又称帕累托法则,是由19世纪末20世纪初的意大利经济学家帕累托提出的。
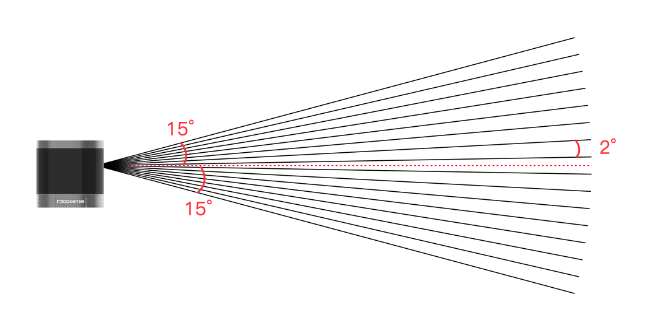
RS-LiDAR-16是速腾聚创推出的16线激光雷达,是一颗非常小型的激光雷达,主要面向无人驾驶汽车环境感知、机器人环境感知、无人机测绘等领域。RS16采用混合固态激光雷达方式,集合了16 个激光收发组件,最大探测距离150米,测量精度+/- 2cm以内。通过激光扫描反射提供三维空间点云数据及物体反射率,为定位、导航、避障等提供有力的保障。
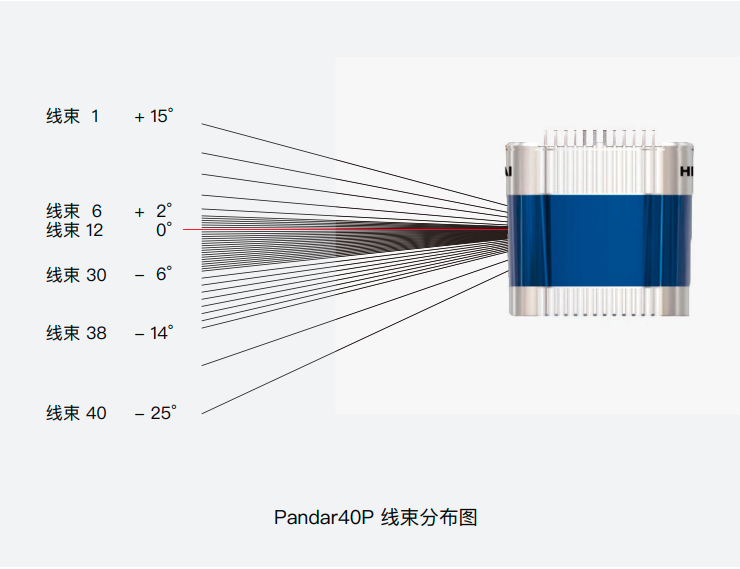
Pandar40P是一款机械旋转式40线激光雷达,其内部包含40个激光器,通过360°旋转实现3D成像。Pandar40P独特的角度分布,使其更加适用于自动驾驶。

本文主要记录华硕的GPU本(RTX2070)如何Ubuntu20.04 + Nvidia显卡驱动 + CUDA11.8 + cuDNN8.7,并验证GPU CUDA生效的过程。
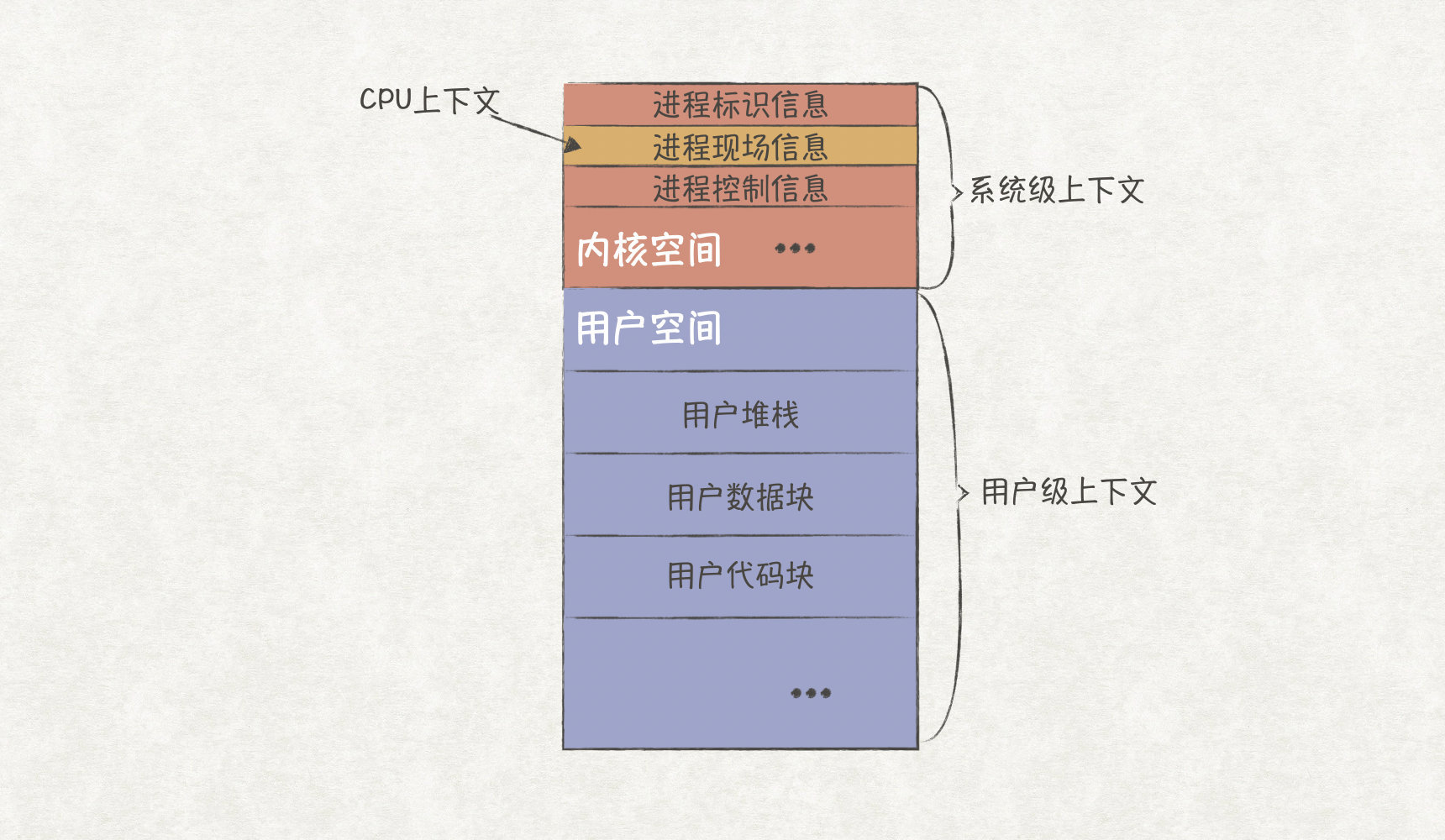
软件工程师们总习惯把OS(Operating System,操作系统)当成是一个非常值得信赖的管家,我们只管把程序托管到OS上运行,却很少深入了解操作系统的运行原理。确实,OS作为一个通用的软件系统,在大多数的场景下都表现得足够的优秀。但仍会有一些特殊的场景,需要我们对OS进行各项调优,才能让业务系统更高效地完成任务。这就要求我们必须深入了解OS的原理,不仅仅只会使唤这个管家,还能懂得如何让管家做得更好。本文主要探索其中的冰山一角:CPU的调度原理。
上一次,我们尝试了用户空间自定义函数探测,里边会用到进程ID参数,那么实际使用场景下,我们可能需要能检测到进程的拉起和退出,今天就一起来实现下这个小功能。
组播技术实现了IP网络中点到多点的高效数据传送,由于组播能够有效地节约网络带宽、降低网络负载,因此在实时数据传送、多媒体会议、数据拷贝、游戏和仿真等诸多方面都有广泛的应用。本文介绍了组播的基本概念和目前通用的组播协议,以及组播组网的基本方案。
简单粗暴监控系统状态并保存到LOG文件:
ROS1官方不再支持Ubuntu 22.04,如果想在22.04 使用ROS1 Noetic一般只能自己编译整套ROS, 需要解决数量众多的库依赖和 C++ 版本兼容问题,对于初学者来说是个不小的挑战。
上一次,我们通过uprobe实现一个对用户空间自定义程序的特定函数出入口进行代码注入和探测的方法,但它还有很多不完善的地方,比如需要提前准备好编译后的函数符号,同时生产环境产出通常也不带符号、产出的部署位置通常也不固定,给我们在实际场景中使用带来不便。本文就讲解下如何通过导出符号表、产出去符号,通过符号表的offset、类函数名、进程PID来进行用户自定义函数调用的探测,从而更方便直接在生产环境使用。
Q:
上一次,我们通过kprobe实现一个简单的内核系统调用捕获,了解了如何在内核函数的出入口动态注入自定义代码,并通过ring buffer传递到用户空间。今天,我开始带大家通过uprobe实现一个对用户空间自定义程序的特定函数出入口进行代码注入和探测的方法。
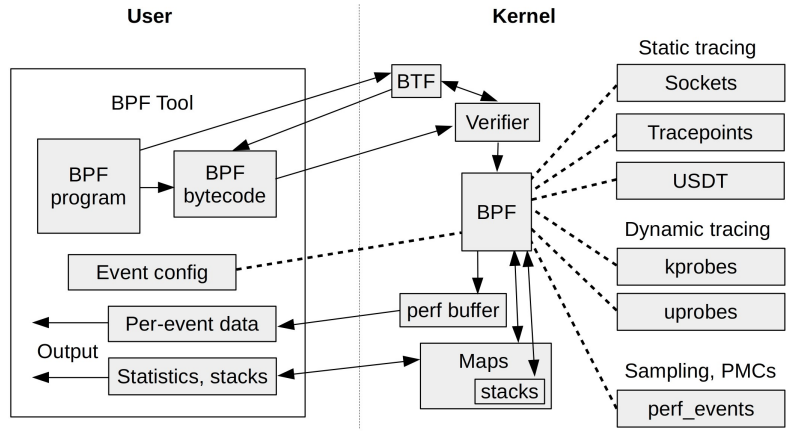
在前两篇文章中,我们了解了eBPF的基本知识。本文开始进行一次具体的实践,带大家通过kprobe实现一个简单的内核系统调用捕获,来了解如何在内核函数的出入口动态注入自定义代码。
Kazam 是一款简单易用的屏幕录制软件,专为 Ubuntu 用户设计。它可以帮助您轻松录制屏幕、摄像头、声音等,并支持多种输出格式,包括 MP4、MKV 和 OGG 等。
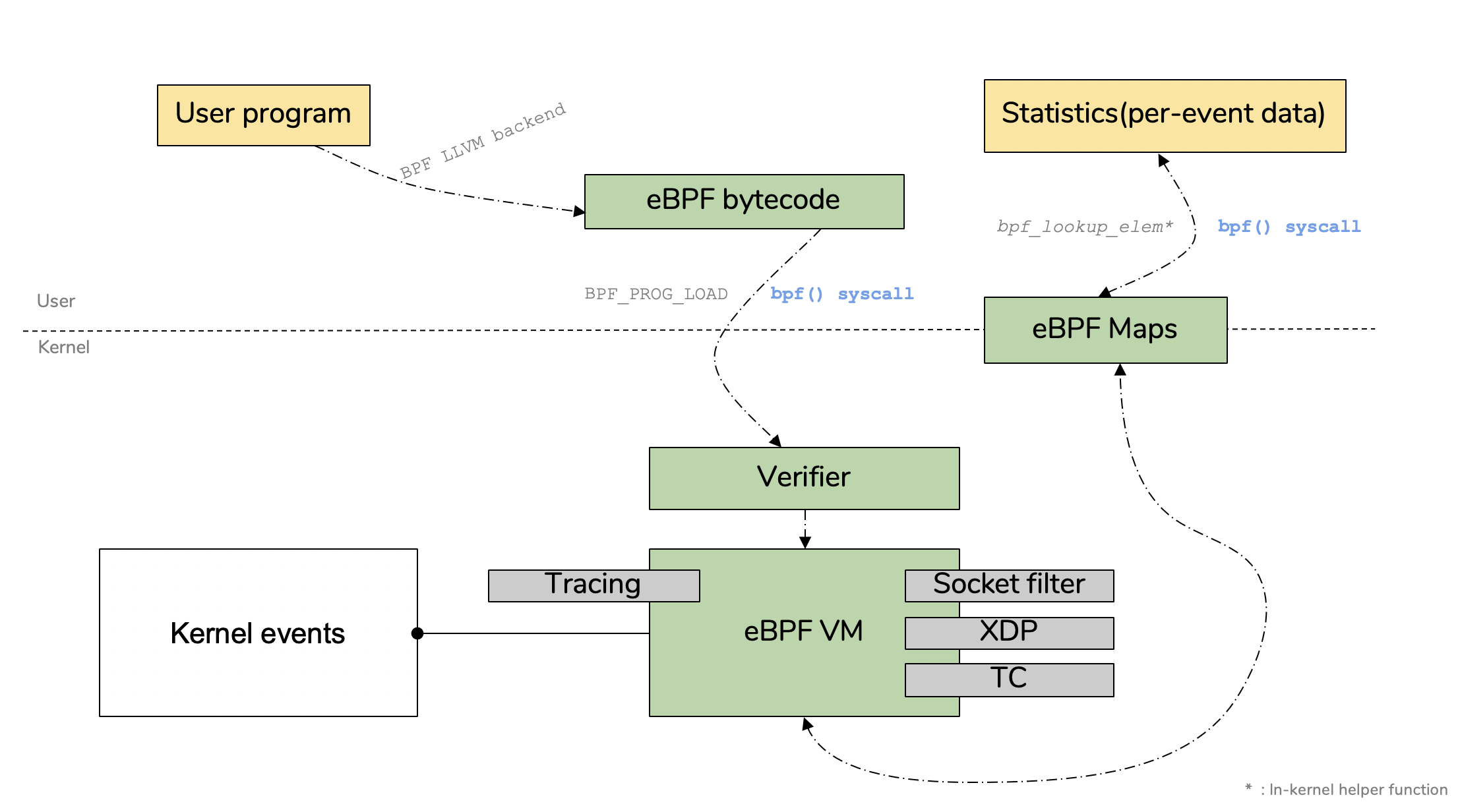
上一次,我们对eBPF有了基本的了解,并实现了一个简单的kprobe监听。本文我们从BPF Map开始,了解如何将在内核中抓取到的数据传递到用户空间。了解BPF Map是从0开始独立编写一个eBPF程序的必经之路。
装了Ubuntu20和22的双系统,开机菜单里前两项默认是20的系统,后两项是22的系统,最近想频繁使用22,每次开机一忘记选择就需要reboot太麻烦,记录下修改默认开机顺序的方法: