我们在编写程序时经常会用到enum枚举类型,使用非常方便。但是当枚举定义较多时,在LOG打印时输出值很难直观的明白其含义,必须对照enum定义。本文介绍一个比较简单的方法,让LOG打印或std::cout输出枚举值时,直接输出文本。
C++ enum枚举的输出重载
发表评论
我们在编写程序时经常会用到enum枚举类型,使用非常方便。但是当枚举定义较多时,在LOG打印时输出值很难直观的明白其含义,必须对照enum定义。本文介绍一个比较简单的方法,让LOG打印或std::cout输出枚举值时,直接输出文本。
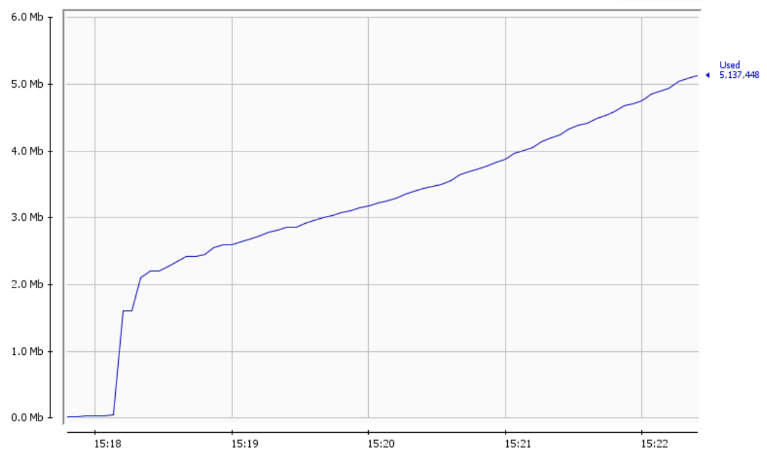
有时用vscode打开比较大的工作目录,用一会儿机器会突然卡顿,鼠标都移动不了,但是查看系统资源会发现cpu全是空闲的,mem占用也不到50%,但是swap几乎处于打满状态。
之前体验过Ubuntu22.04版本后感觉新增的小工具很好用,就把几台linux设备都升级到了Ubuntu22,最近开发一个新功能,其中必须的编译依赖工具bcloud要求最高Ubuntu20下才能用,然后就悲催了,实在不想重装系统了,打算做一个ubuntu20+bcloud及依赖库的docker镜像,本文就记录下过程。
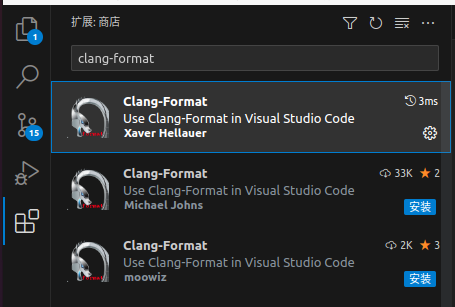
日常开发时,不论是企业或组织都会对代码格式有统一的要求,本文主要讲解如何在vscode中自动按Google C++代码规范进行代码自动格式化和检查提示。如有需要也可以在此基础上进行自定义调整。
使用cmake编译的时候提示:CMake 3.20 or higher is required. You are running version 3.16.3.

之前编写过一个小框架,最近需要为它编译一个arm64的产出,但是由于arm板子不在手上,只能在x86上编译出arm的产出后再发给对方部署。
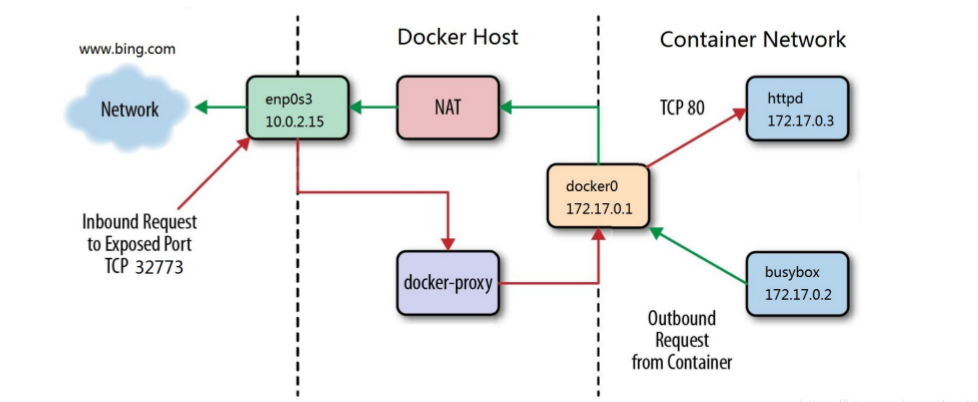
今天需要在一个docker镜像容器内访问外网,发现ping不通无法访问,这里记录下解决过程。
最近在开发一个小的C++项目,由于ASan比较便于在开发阶段帮助发现内存问题,所以在编译设置里默认都是打开的,它工作的很好,帮助团队发现了不少问题。
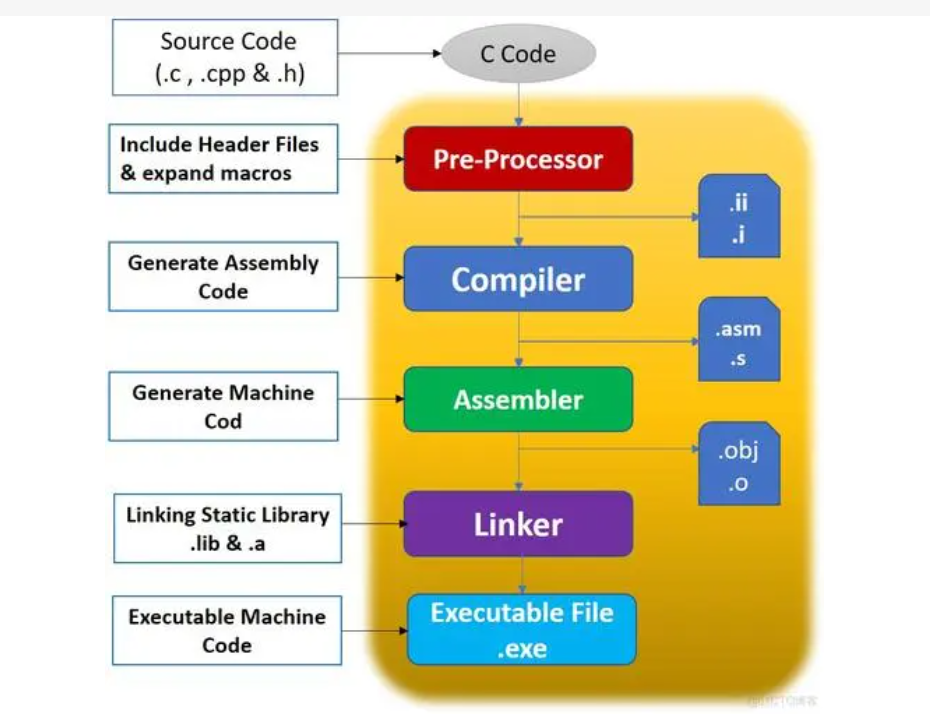
我们在编写C++程序时经常用到.so库,有外部的也有自己编写的,那么在程序编译后,如何查看可执行程序或动态库的依赖关系呢?有些项目启动时加载大量的.so库导致启动速度慢,如何便捷的清理已不使用的so文件呢?本文就给大家简单讲一下。

五一假期陪娃到外地参赛,比赛期间闲来无事,拜读了唐浩明版的《曾国藩》。以前喜欢读资治通鉴、史记,学到不少知识,但这本《曾国藩》并不是正史,而是一本小说,里边结合了曾家流传下来的曾国藩家书、手记等,增加了一些虚构的成分,但总体来说写的不错,把那个年代中一代重臣跌宕起伏的官场生涯描绘的栩栩如生。

文明的进步,就是人们在不假思索中可以做的事情越来越多。——阿尔弗雷德·诺思·怀特黑德
人类在长期的进化过程中,为了不断提高效率,逐渐形成了不少条件反射的思维/行为模式,它能帮我们节省思考的时间和精力。通过经验习得的心理原则和范式,使我们根据少数关键特征对自动反应分类,一碰到这样那样的触发特征,就不假思索的做出反应。

这几天听何老师讲财务管理,对一个财务门外汉来说收获不少,本文梳理总结一下。

我们在编写C++框架时,经常会涉及到一项基础技术,就是根据“一个动态库 + 一个类名称字符串“,动态的创建类对象。

电脑原来安装了ubuntu18.04,后来升级成了ubuntu22.04。昨晚手欠,想着ubuntu18好些天也不用了,就把ubuntu18的分区格式化了,然后悲剧了,重启电脑提示没有可启动的操作系统。看起来是ubuntu22的启动引导在ubuntu18的分区里一起被格式化了。

我们日常在定位C++的Core问题时,经常会遇到Core位置并非真实问题点的情况,在release无符号偶发场景下定位会更加困难。今天就通过一个问题场景,来讲解下如何通过IDA来进行此类问题的定位。

一个人身处管理位置,责任重大、事务繁多,在设定目标、明确利益、配置资源后,除了方向和风险把控/跨部门协调/资源/人事调整等需要自己亲自抓以外,其他工作通常都需要授权给下属来完成。

当一个类的成员函数里需要把当前类对象作为参数传给外部时(例如传递给异步线程),如何安全的的传递和释放将是一个棘手的问题,而C++11的enable_shared_from_this就是为此而设计的,本文就和大家一起来解析下。
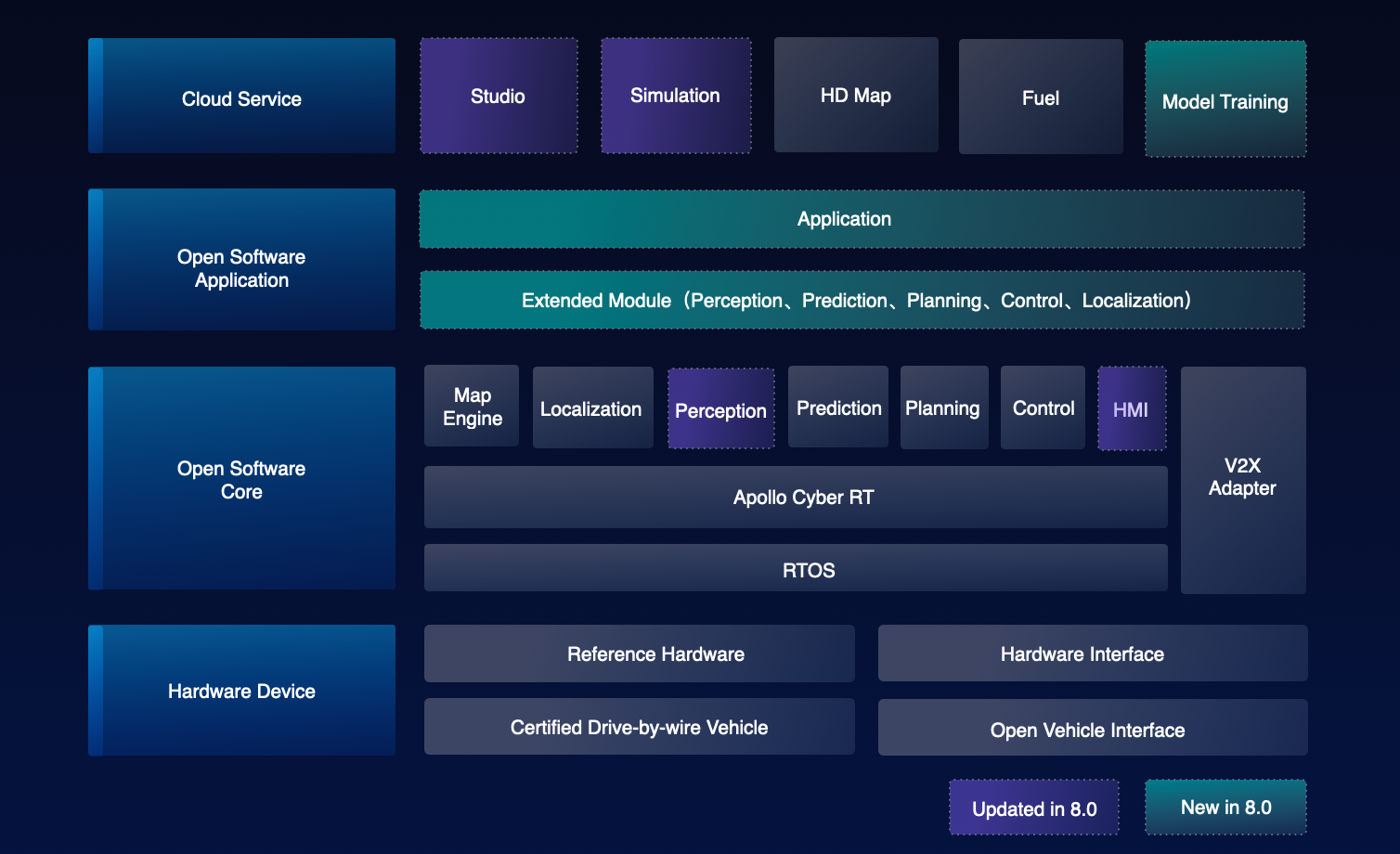
Apollo平台架构:
在我的认知里,“领导力”是一个过程,在这个过程中,领导者能激发其他人全心投入,去完成一项与这个组织的价值观相一致的任务。
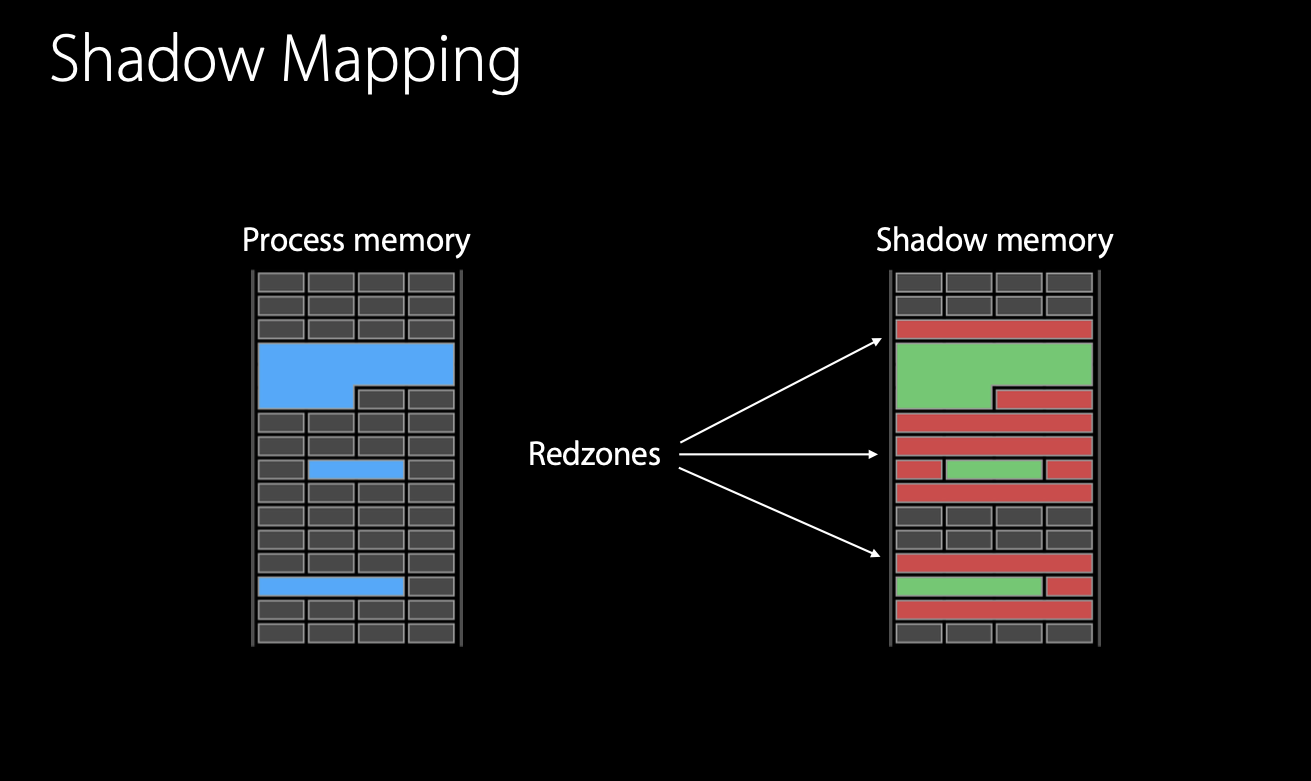
自操作系统诞生以来,编写内存安全的代码一直是一个比较困难的问题 (另一个问题则是保证线程安全)。来自微软安全响应中心(MSRC)近20年来的安全数据显示,有约 70% 的安全漏洞补丁是针对内存安全漏洞的修复。