
电脑原来安装了ubuntu18.04,后来升级成了ubuntu22.04。昨晚手欠,想着ubuntu18好些天也不用了,就把ubuntu18的分区格式化了,然后悲剧了,重启电脑提示没有可启动的操作系统。看起来是ubuntu22的启动引导在ubuntu18的分区里一起被格式化了。
电脑原来安装了ubuntu18.04,后来升级成了ubuntu22.04。昨晚手欠,想着ubuntu18好些天也不用了,就把ubuntu18的分区格式化了,然后悲剧了,重启电脑提示没有可启动的操作系统。看起来是ubuntu22的启动引导在ubuntu18的分区里一起被格式化了。
部署了一台新的Ubuntu20机器,在wget指定产出仓库的output.tar.gz文件时,报以下错误:
在一块新的pi4板子上装了ubuntu20.04,结果连wifi一直弹出”Authentication required. System policy prevents WiFi scans”的认证提示,没完没了的弹,点了之后也无法输入密码。

最近换了台服务器,在发布pydp时依赖的人脸识别库dlib总是安装失败,查了下pip安装dlib似乎都会遇到这个问题,这里记录下解决方法。
之前学习ros,nvidia jetson nano板子装的ubuntu18.04系统比较正常,但是pi4b的板子装的raspberry系统会出现各种依赖问题。最近想充分利用下几块Pi4B的板子,反复试了pi4安装官方/非官方的ubuntu18.04.5+ROS Melodic版本,最终都会卡在map-server或rviz等依赖上。最终用Pi4B + Ubuntu20.04.3 + ROS Noetic + RpLidar安装测试成功,记录一下安装过程。
开发板平时不连接显示器,放时间久了会自动挂起连不上,解决方法如下:
今天用docker部署一个web服务时遇到总是连不上宿主机mysql数据库的问题,报SQLSTATE[HY000] [2002] Connection refused,经过测试,宿主机用相同配置可以连上,登入docker容器内就连不上,初步判断容器内通过localhost或127.0.0.1是连不上宿主机的。具体原因和解决方法如下:
官网的安装总是因为各种墙安装失败,用国内这个地址很好用:
使用ssh远程登陆服务器之后,过一会儿连接就会被自动断开,频繁的登陆太麻烦,这里把解决方法贴出来。
日常经常通过mars机器访问vpn机器,会频繁需要输入vpn机器的密码,如何实现ssh免密登陆呢?

Linux开发者越来越多,但是仍然有很多人整不明白POSIX是什么。本文就带着大家来了解一下到底什么是POSIX,了解他的历史和重要性。
在某些特殊情况下,我们从一台机器向另一台机器传输文件时会遇到受限于堡垒机或scp被禁等情况,这里分享一个使用nc传输大文件的方法。
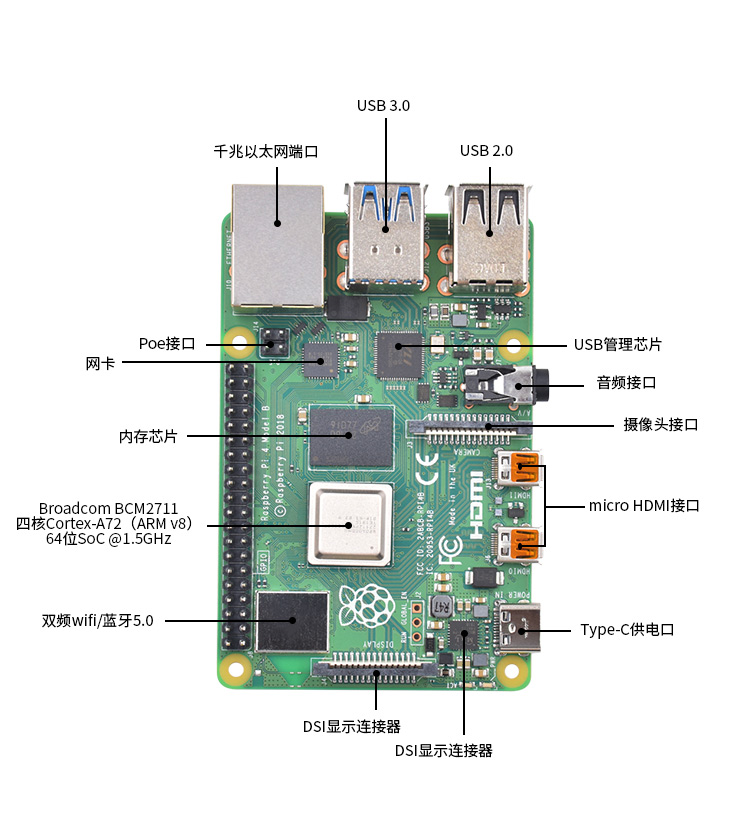
新入手一个Pi4,4核1.5GHz 64位A72处理器、8G内存(想起我的第一台电脑,赛扬处理器+512M内存…),用来做机器人的控制中心。由于树莓派4暂时还无法使用Ubuntu MATE,本文讲解给它安装Raspberry Pi OS系统 + ROS Melodic的过程。

申请了好久的预算老婆终于批了,入手华硕的GPU本(RTX2070),默认预装了正版win10,平时还是习惯用linux,本文记录了如何安装ubuntu18.4的过程。

系统里莫名其妙的自动启动一些东西,怎么才能禁止他们启动呢?本文梳理了下mac能实现开机启动的几个地方,大家要是发现还有别的途径欢迎留言反馈。

孙宇聪,CTO @ coding.net 。2007 – 2015 年初在 Google 的 Moutain View 担任 SRE 职位。 参与了 Google 的两个项目:第一个是 Youtube,工作内容涵盖 Video transfer、Coding、Streaming、Global CDN 等;第二个是 Google Cloud Platform Team,主要工作是管理 Google 全球 100 万台左右的服务器,开发用于管理 Google 整个云平台的任务调度、协作的集群管理系统 Omega 。

Kubernetes是容器集群管理系统,是一个开源的平台,可以实现容器集群的自动化部署、自动扩缩容、维护等功能。
简单点说,这个工具能解决nohup python faceswap.py train & 报cannot connect to X server的问题,即远端的程序不能后台运行,但是你的网络又经常会断开,用Tmux就好了
程序概念、int变量、if判断、函数概念
Mark:http://whuhan2013.github.io/blog/2016/09/16/python-matplotlib-learn/