闫金钢的Blog
自律自省,不喜不悲,保持爱心和希望
菜单
跳至正文
首页
关于
标签归档:
ros2
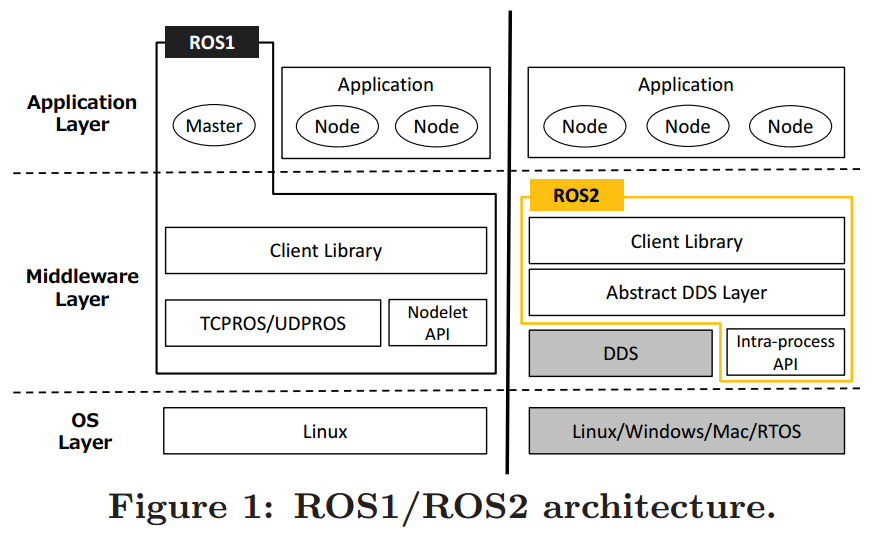
机器人操作系统ROS—ROS2探索
发表评论
简单点说,ROS2与ROS最大的区别就是:
阅读全文